
논하는 세부 주제들 개요 MAX 25 links
•
저자는 구현체를 공개했지만, 이것은 추론 구현체에 불과하다.
•
Top-down approach
1.
가장 높은 수준에서의 추론 파이프라인은 결국 아래와 같이 요약할 수 있다.
# apply pre-processing to image
image = self.transforms(original_image)
# convert to an ImageList, padded so that it is divisible by
# cfg.DATALOADER.SIZE_DIVISIBILITY
image_list = to_image_list(image, self.cfg.DATALOADER.SIZE_DIVISIBILITY)
image_list = image_list.to(self.device)
# compute predictions
with torch.no_grad():
predictions = self.model(image_list)
predictions = [o.to(self.cpu_device) for o in predictions]
Python
복사
•
predictions 변수는 torchvision 의 자료형이 들어있는 리스트이다.
•
self.transforms, self.model 을 확인하면 될 것 같다.
2.
self.transforms
3.
self.model
class PMTDDemo(COCODemo):
CATEGORIES = [
"__background",
"text"
]
# ...
# Copyright (c) Facebook, Inc.
class COCODemo(object):
# COCO categories for pretty print
CATEGORIES = [
# 어차피 PMTDDemo 에서 덮어씀
]
def __init__(self, cfg, masker, ... ):
# ...
self.model = build_detection_model(cfg)
# ...
if show_mask_heatmaps:
self.masker = Masker(threshold=-1, padding=1)
else:
self.masker = masker
# Copyright (c) Facebook, Inc.
from .generalized_rcnn import GeneralizedRCNN
_DETECTION_META_ARCHITECTURES = {"GeneralizedRCNN": GeneralizedRCNN}
def build_detection_model(cfg):
meta_arch = _DETECTION_META_ARCHITECTURES[cfg.MODEL.META_ARCHITECTURE]
return meta_arch(cfg)
Python
복사
•
모델 설정과 관련된 정보를 담고 있는 cfg 와 masker 이외에는 신경쓸 필요가 없다. 왜냐하면 저자는 self.model 을 직접 만든 것이 아니라, 그냥  maskrcnn-benchmark의 구현체를 불러다가 사용하고 있기 때문이다. 아래는 저자가 모델을 만들기 위해 사용하는 코드이다. masker 변수에 maskrcnn-benchmark 구현체 내에 구현되어 있는 Masker 클래스를 사용하는 것이 아니라 직접 제작한 PlaneClustering 클래스를 사용하고 있다.
maskrcnn-benchmark의 구현체를 불러다가 사용하고 있기 때문이다. 아래는 저자가 모델을 만들기 위해 사용하는 코드이다. masker 변수에 maskrcnn-benchmark 구현체 내에 구현되어 있는 Masker 클래스를 사용하는 것이 아니라 직접 제작한 PlaneClustering 클래스를 사용하고 있다.
from demo.inference import PlaneClustering
from maskrcnn_benchmark.modeling.roi_heads.mask_head.inference import Masker
if args.method == 'PlaneClustering':
masker = PlaneClustering()
else:
masker = Masker(threshold=0.01, padding=1)
from maskrcnn_benchmark.config import cfg
cfg.merge_from_file("configs/e2e_PMTD_R_50_FPN_1x_ICDAR2017MLT_test.yaml")
cfg.merge_from_list([
'MODEL.DEVICE', args.device,
'MODEL.WEIGHT', args.model_path,
'INPUT.MAX_SIZE_TEST', args.longer_size,
])
pmtd_demo = PMTDDemo(
cfg,
masker=masker,
confidence_threshold=0.5,
show_mask_heatmaps=False,
)
Python
복사
•
다음으로 탐색할 소스코드는 두 가지이다. 첫째, PlaneClustering 클래스를 알아보아야 한다. 둘째, masker 변수가 self.model 과 상호작용하는 방식을 확인하는 것이다.
4.
PlaneClustering
•
PlaneClustering 은 Masker 클래스를 상속받았다. 따라서 5를 분석한 뒤 어느 부분부터 분석을 해야 하는지를 알아보도록 한다.
from maskrcnn_benchmark.modeling.roi_heads.mask_head.inference import Masker
class PlaneClustering(Masker):
def __init__(self):
...
def forward_single_image(self, ...):
...
def reg_pyramid_in_image(self, ...):
...
Python
복사
•
masker 변수는 __call__ 이 구현되어 있다. 이 함수에서는 배치 차원 각각에 대해서 forward_single_image 을 호출한다. PlaneClustering 클래스는 forward_single_image 함수만을 구현한다.
•
이 함수는 다음 코드를 포함하고 있다.
◦
high level view
# arg: mask: shape (28, 28), ranged [0, 1]
if torch.max(mask) <= 0.7:
raise ValueError('No apex')
# arg: mask[..., None]: (28, 28, 1), ranged [0, 1]
# arg: self.assist_info: (28, 28, 3), ranged [0, 27]
src_points = torch.cat([self.assist_info, mask[..., None]], dim=2)
pos_points = src_points[(mask > 0.1) & (mask < 0.8)]
# ret: src_points: (28, 28, 4), ranged [0, 27]
# ret: pos_points: (28x28개_픽셀_중_조건을_만족하는_픽셀의_수, 4)
planes = plane_init(pos_points, ideal_value=1)
planes = plane_clustering(pos_points, planes)
points = get_intersection_of_plane(planes)
# ret: planes: (3, 4) - 평면 4개 각각의 평면방정식 변수 3개
# ret: points: (4, 2) - 평면 4개의 바닥면에서 교점, 값의 범위 [0, 27] 을 보장할 수 없음.
if not is_clockwise(points):
raise ValueError("Points is not clockwise")
points = torch.clamp(points, - 0.5 * MASK_SCALE, 1.5 * MASK_SCALE)
Python
복사
◦
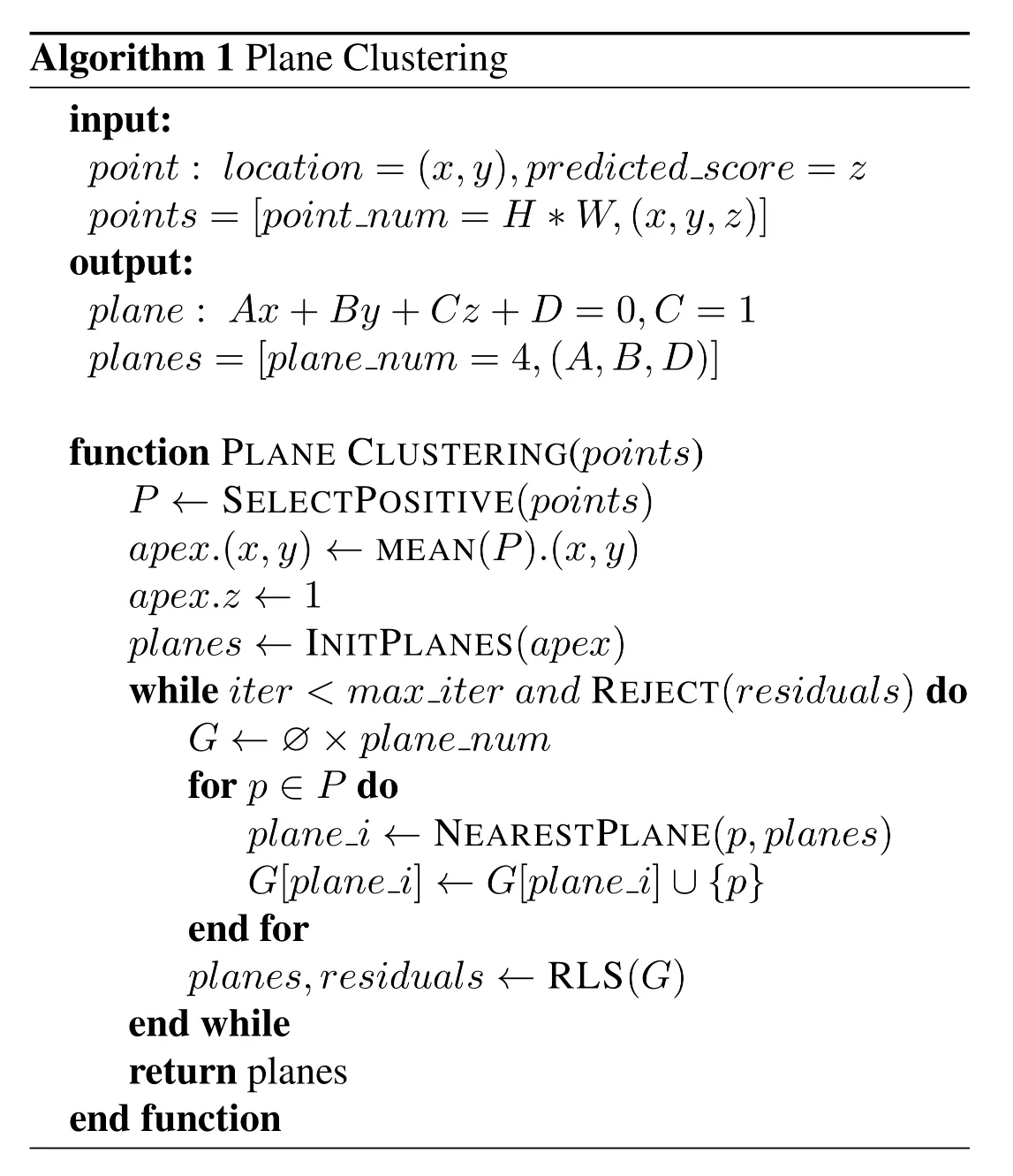
plane clustering algorithm
def plane_clustering(pos_points, planes, iter_num=10):
ones = torch.ones((1, 4), dtype=torch.float32)
for iter in range(iter_num):
ans = torch.abs(torch.matmul(pos_points, torch.cat([planes, ones])))
partition = torch.argmin(ans, dim=1)
point_groups = [pos_points[partition == i] for i in range(planes.shape[1])]
for i, group in enumerate(point_groups):
if len(group) == 0:
continue
X = group[:, :3]
B = -group[:, 3:]
A = torch.lstsq(B, X)[0][:3]
abs_residuals = torch.abs(torch.matmul(X, A) - B)
abs_residual_scale = torch.median(abs_residuals)
if abs_residual_scale > 1e-4:
X_weight = abs_residuals / (6.9460 * abs_residual_scale)
X_weight[X_weight > 1] = 0
X_weight[X_weight <= 1] = (1 - X_weight[X_weight <= 1] ** 2) ** 2
X_weighted = X_weight * X
X = torch.matmul(X_weighted.t(), X)
B = torch.matmul(X_weighted.t(), B)
A = torch.lstsq(B, X)[0]
planes[:, i] = A.flatten()
return planes
Python
복사
5.
masker 변수와 self.model 의 관계
•
Masker 클래스가 무엇을 하는 역할인지를 mask-rcnn 논문, 코드와 연관지어 생각해 보아야 한다.
◦
bounding box 로부터 지정된 특정 위치에 해당하는 이미지의 영역에 mask set 을 프로젝션한다.
class Masker(object):
"""
Projects a set of masks in an image on the locations
specified by the bounding boxes
"""
Python
복사
◦
Mask R-CNN 에서 마스크 브랜치의 최종 output 텐서인 mask 의 크기는 굉장히 작다. 그리고 원본 영상과의 위치관계가 제거되었다고도 볼 수 있다.
▪
◦
따라서 mask 를 projection 한다는 것은 다음을 의미한다.
해당 mask 를 만든 영역 제안이 그리는 bounding box 와 이에 해당하는 RoI 가 원본 영상에서 차지하는 영역에 해당 mask 를 잘 펼쳐 바른다.
기존 개요가 마음에 들지 않아서
엔트리를 다음과 같이 변경한다.