
@3/30/2022, 4:04:00 PM 장후
정밀지도라는 걸 쓰면 생기는 문제들 중에 대표적인 두 가지만 소개해 볼게.

이 로드뷰를 봐봐. 사람은 이 로드뷰 사진을 보고, 아 여기가 건대 일감호구나를 알 수 있어. 그러니까 왼쪽 지도에 보이는 장소에서 카메라를 세워놓고 찍었구나. 를 알 수 있어. 사람이랑 마찬가지로 컴퓨터도 이 사진을 보고 “아 이 카메라는 이 장소에서 여길 보면서 서있구나.” 를 알 수 있어. 그래서 나랑 준서는 이런 사진들을 잔뜩 모아서 일감호의 정밀지도를 미리 만들어두어야 했었어. 이게 첫 번째 문제야. 사람은 일감호에 처음 가더라도 잘 걸어다닐 수 있는데, 킥보드는 미리 한번쯤은 방문해서 로드뷰를 만들어둔 적이 있어야 자율주행이 동작할 수 있어.

그런데 여기 또 문제가 있어. 사람은 이 사진을 보고 어떻게 기억을 하냐면, 나무가 대충 여기 서있구나, 건물이 저 멀리 보이는구나, 양쪽에 인도가 있구나, 왼쪽에는 호수가 있구나 이런 특징들을 기억을 하거든. 그런데 컴퓨터는 나무가 뭔지 모르고, 건물이 뭔지 모르고, 인도가 뭔지 모르고, 호수도 뭔지 모르잖아. 그래서 컴퓨터는 어떻게 이 장소를 기억해 두냐면, 이렇게 사진에서 뾰족뾰족한 것들만 기억을 해. 뾰족한 모양이 이렇게 생긴 것이 여기 있고, 뾰족한 모양이 이렇게 생긴게 여기 있고, 뾰족한 모양이 이렇게 생긴게 여기 있고, 뾰족한 모양이 이렇게 생긴게 여기 있으면, 이 사진이 찍힌 장소는 여기다! 라고 기억을 해 둔다는말이야.
그래서 이게 무슨 문제가 되냐면, 나랑 준서가 여기 가서 여름에 열심히 지도를 만들었어. 그런데 딱 여섯 달 후에 여기를 또 간다고 쳐보자.
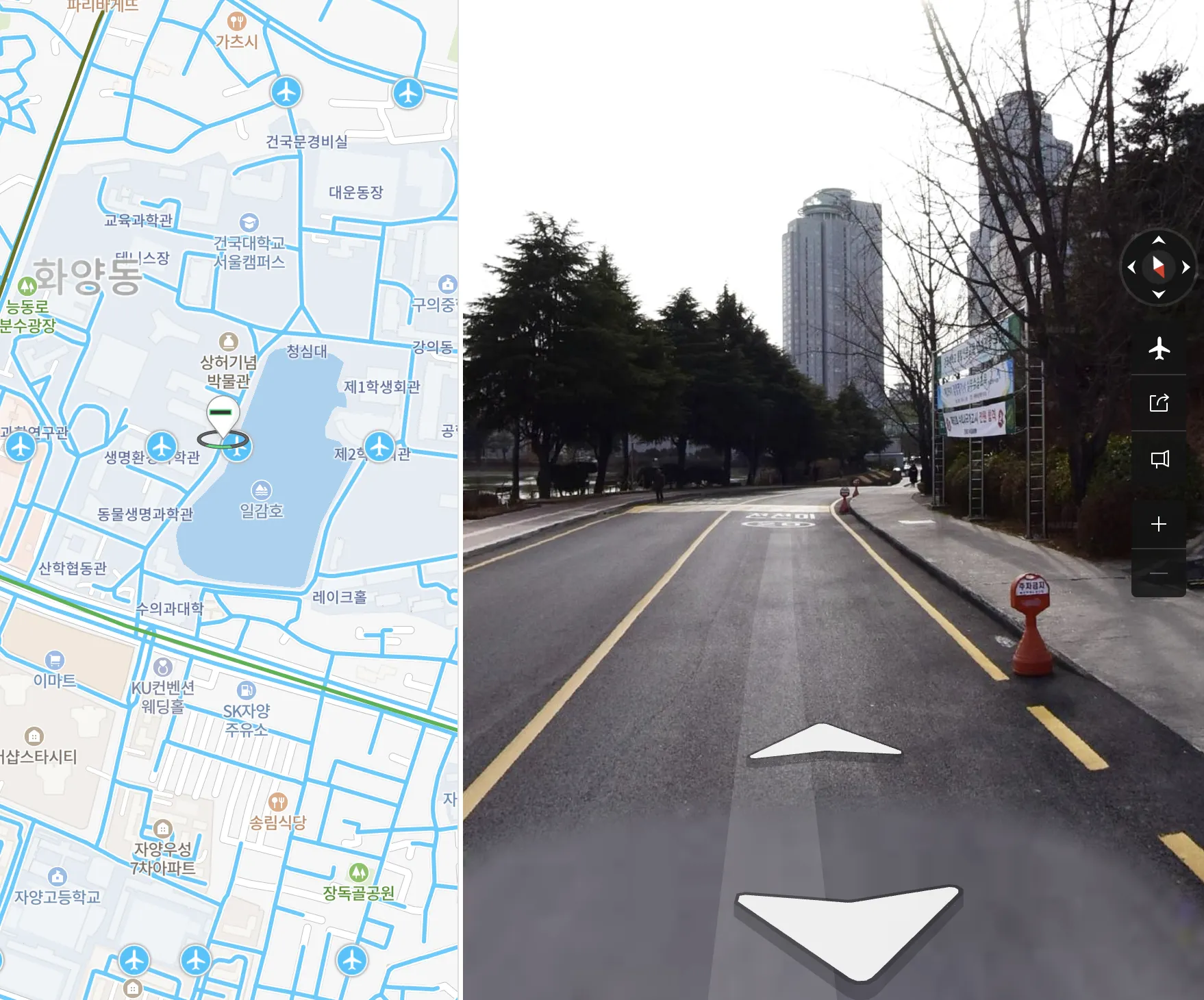
겨울에 가면 나뭇잎이 전부 다 떨어져 있을거야. 아까 말했듯이 컴퓨터는 뾰족한게 어디 있는지를 보고 장소를 기억한다고 했는데, 오른쪽 나무의 나뭇잎이 하나도 없으니까 컴퓨터 입장에서는 난생 처음 보는 뾰족뾰족한 풍경과 난생 처음 보는 장소인거지. 그 전에 열심히 만들어두었던 지도가 전혀 쓸모가 없어져버려.
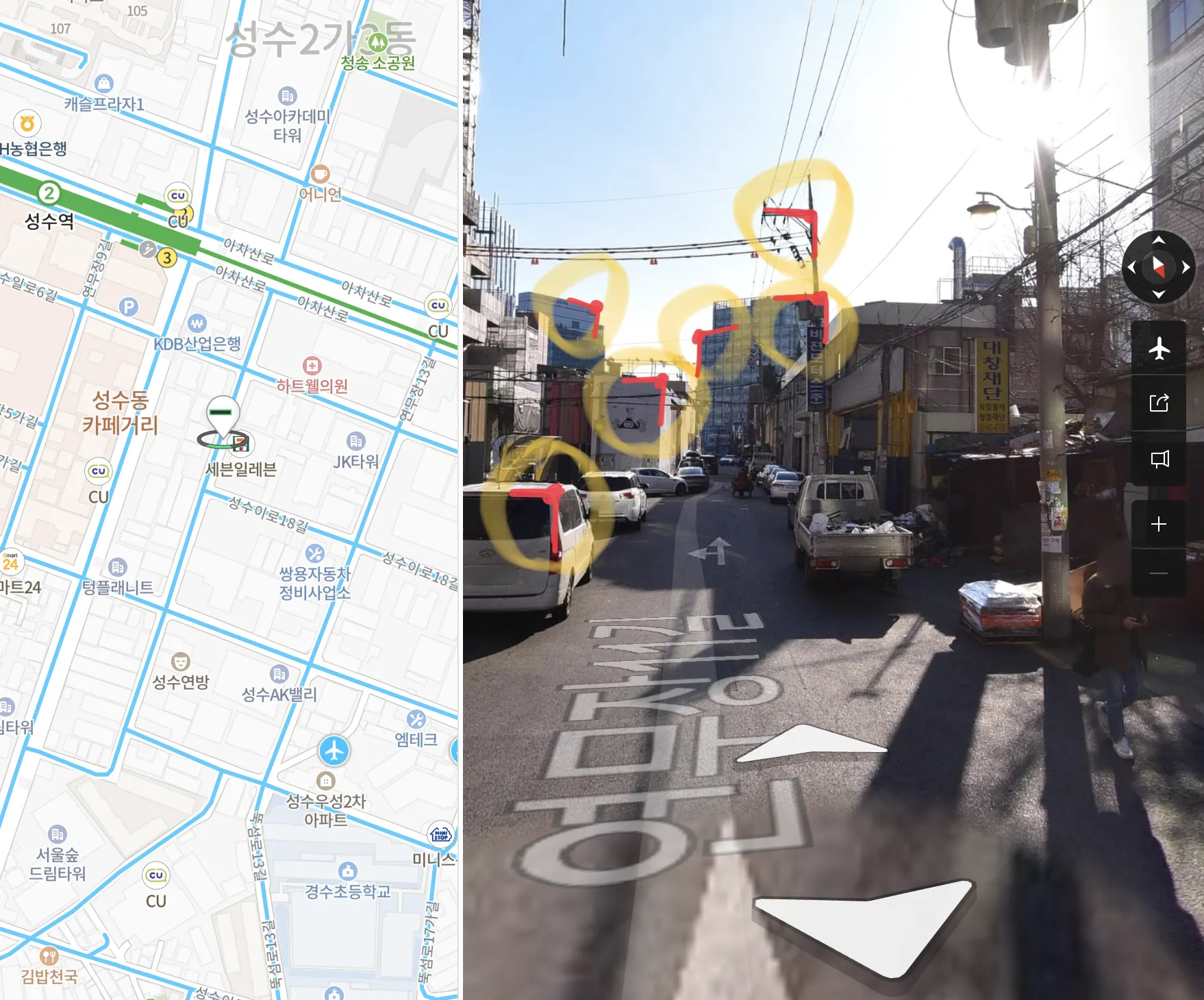
이해를 돕기 위해 예시를 하나 더 가져왔어. 이건 성수동의 로드뷰야. 컴퓨터는 무조건 뾰족뾰족한걸 기억한다고 했잖아. 여기 보면 건물이나 전봇대 이런것들을 보고 뾰족뾰족한 것들이 어떻게 생겼는지를 저장을 했을거고, 동시에 주차돼 있는 자동차의 뾰족한 요소도 저장을 해 뒀겠지?
그런데 주차된 자동차라는 것은 달리 말하면 이 주차된 자동차가 언제든 사라질 수 있다는거잖아. 그러니까 컴퓨터가 보기에는, 단순히 차가 한 대 사라진 것이 아니라, 아주 중요한 뾰족한 것이 사라져버린거야.
환경이 변하면 그 전에 만들어두었던 지도가 전혀 쓸모가 없어진다! 여기까지가 정밀지도라는 방법의 두 번째 문제야.
FULL (deprecated)
parse me
1.
None
from
supplimentary
1.
None
opposite
1.
None
to
1.
None
참고
1.
None