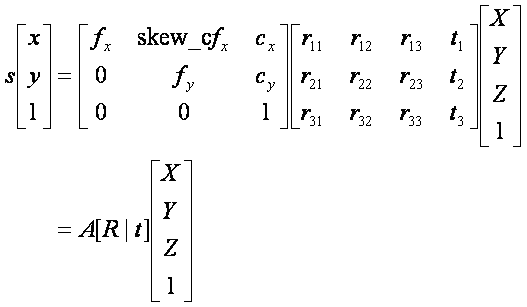
카메라 영상은 3차원 공간상의 점들을 2차원 이미지 평면에 투사(perspective projection)함으로써 얻어집니다. 핀홀(pinhole) 카메라 모델에서 이러한 변환 관계는 다음과 같이 모델링됩니다. (그림 참고) s[x,y,1] = KA[R|t](X,Y,Z,1) 여기서, (X,Y,Z)는 월드 좌표계(world coordinate system) 상의 3D 점의 좌표, [R|t]는 월드 좌표계를 카메라 좌표계로 변환시키기 위한 회전/이동변환 행렬이며 A는 intrinsic camera matrix입니다.