목차
첫 작성일 2021/05/26, 구체화 2021/07/31
작성 중
들어가기 전에
자율주행에 관심이 없고, 공유 킥보드에 대해서 잘 모르고 있다면 전혀 상상할 수 없을 이야기를 담았다.
작년 11월부터 국내 공유킥보드 스타트업에서 자율주행 킥보드를 개발하고 있다. 개인적으로도 킥보드에 자율주행을 도대체 왜 시키냐, 그게 그만한 효용가치가 있냐 에 대한 질문을 정말 많이 받았다. 효용에 대한 확신은 있었지만 대답하기도 귀찮았다. 항상 "아 그거 만들어서 사람 태울 거 아니야.. 운영 최적화랑 재배치 하려고 만드는거야".. 라고 둘러 댔지만 말이다.
게다가 미래에 사용될 디바이스를 그리는 엔지니어가, 큰 그림에 대한 고민 없이 잡히는 것만 만들다 보면 나중에는 정말 대참사가 일어날 수 있다. 나는 집을 화이트톤으로 꾸밀거야! 하고 집 전체를 화이트로 꾸몄는데, 책상을 바꾸려고 보니 환경 규제에 의해 흰색 페인트 사용이 금지되었고, 시중에는 우드톤의 책상밖에 없다고 생각해 보자. 이제는 집 전체를 뜯어고치거나, 포기해야만 한다. 자율주행 시스템도 마찬가지이다. 일론 머스크가 "테슬라는 레이다 라이다 절대 안 써" 라고 하는 말을 들어 본 사람들이 있을 것이다. 한 순간의 선택이 그 위에 쌓아올리는 전체 시스템을 결정할 수 있다. 따라서, 특히 스타트업에서는, 나같이 아무리 허접한 R&D+엔지니어링 일을 하는 사람이더라도, 린하게 달리면서도 내 선택에 의해 화이트톤으로 만든 집에 우드톤 가구를 어디에 놓아야 집에 잘 어울릴지 심각하게 고민해야 하는 미래가 닥칠지 집을 뜯어고치지는 않게 될지 10년 단위의 고민도 끊임없이 해야 한다.
여튼, 그런 맥락에서 나는 확신을 하고 있더라도 세계적으로 이 가치에 공감하는 기업이 있는가 고민해볼 필요가 있었다. 그 결과 얻은 인사이트를 담아 글로 한 번 정리하고 싶었다. 기술기업의 비즈니스 확장 전략에 대해 관심이 있다면 이 글이 굉장히 재미있을 것이라고 확신한다. 기업이 어떻게 현실의 문제를 기술적으로 풀어나가는지, 문제 해결이란 어떻게 일어나는지 그 어려움은 무엇인지 엿볼 수 있어서 재미있으리라 생각한다.
아래 내용은 전적으로 나의 개인적인 의견이다. 피드백과 새로운 정보들은 언제나 환영 
그래서, 오늘의 주제는 세그웨이이이다!
세그웨이 (Segway)?
세그웨이-나인봇은 전기를 동력으로 하는 이동 장치를 생산하는 테크 기업이다. 해외뿐아니라 국내에 들어와 있는 수많은 기업들이 거의 대부분 세그웨이-나인봇*에서 생산한 킥보드를 대량으로 구매한 뒤 공유킥보드로 활용하고 있다. 다른 업체의 킥보드를 사용하던 업체들조차도 모든 공유킥보드 업체들이 양산력을 갖추고 공유킥보드 전용으로 출시되는 세그웨이-나인봇 제품으로 조금씩 넘어오고 있는 추세이다.
고장 로그를 전세계로부터 받기 때문에 그런 부분을 계속 패치해서 제품을 생산하기 때문에 공유킥보드 업체 입장에서는 거의 완벽한 상태의 제품을 사용할 수 있다.
*이 글에서는 2015년 세그웨이를 인수한 나인봇과 세그웨이를 동일한 대상으로 보겠다.
공유킥보드 하드웨어 세그웨이 독점시대 (정확하진 않지만 대략적인 흐름을 볼 것)
•
빔 (보라색) : 세그웨이-나인봇 MAX + 세그웨이-나인봇 MAX plus
•
라임 (라임색) : 자체생산
•
킥고잉 (연녹색) : 세그웨이-나인봇 ES2 + 세그웨이-나인봇 샤오미2 → 세그웨이-나인봇 MAX
•
디어 (밝은 노랑색) : tuqi → 세그웨이-나인봇 MAX plus
•
씽씽 (노랑색) : 자체생산
•
스윙 (얼룩말) : 다양한 제품군 → 세그웨이-나인봇 MAX plus
•
알파카 (주황색) : 다양한 제품군 → 세그웨이-나인봇 MAX plus
•
지쿠터 (초록색) : 다양한 제품군 → 세그웨이-나인봇 MAX plus
•
...
처음 접했을 때 신선한 충격을 안겨주었던 외발 전동휠도 알고보니 세그웨이 제품이었다. 이렇게 굉장히 창의적인 제품을 최초로 만들거나 기술적으로 어떤 문제를 풀어나가는 능력이 굉장히 훌륭하다고 평가받는 세그웨이는 빌게이츠와 스티브잡스가 사랑한 기업으로도 알려져 있기도 하다. 퍼스널모빌리티계의 애플같은 느낌이다.
여튼, 이런 배경의 세그웨이에서 최근 T60, T60 lite 라는 모델의 프로토타입을 새로 선보였다. T60? T60 lite? 이게 도대체 뭘까? 세그웨이가 최근에 공개한 영상을 한번 먼저 보도록 하자.
T60 lite : 신기하긴 한데, 이걸 어떻게 써먹겠다는거지?
세그웨이는 T60 lite 라는 것을 만들었다.
별 거 없이, 그냥 킥보드에 카메라 달고 장난질 한다고 생각할 수 있다.
영상의 내용을 보면 알 수 있는 것들
•
동영상에 담긴 모습만으로도 유추할 수 있는 기술들은 아래와 같다. 영어에 쫄 필요는 없다.
각 항목의 링크를 클릭하면 관련된 문제를 해결하려는 논문들과 개별 논문들이 제안하는 방법들의 성능을 엿볼 수 있다.
1.
Drivable area segmentation :
딥러닝을 통해 차량이 주행 가능한 영역을 검출하는 기술이다.
2.
3.
Monocular depth prediction :
이 또한, 딥러닝을 통해 보행자와 킥보드 사이 거리를 파악하기 위해 들어갈 기술이다. (보행자 화면에서 low, mid 등의 라벨이 표시되는 것을 보면 거리를 연산하고 있다는 사실을 알 수 있다.) 이를 통해 보행자와의 충돌을 미연에 방지하도록 만들 수 있다. 사람은 두 눈의 시차와 경험을 통해 물체까지의 거리를 파악하지만, 위 영상에서는 카메라가 하나이기 때문에, 딥러닝 신경망의 경험에만 의존한다.
4.
Parking area segmentation :
주차가능한 영역을 판단하는 기술이다.
5.
Visual odomentry & Landmark recognition :
카메라를 통해 GNSS (GPS) 보다 정밀하게 위치를 파악하는 데 사용하는 기술이다.
이를 통해 서비스 권역 이탈 방지기능을 만들수 있다.
6.
사고영상 수집 (블랙박스) 기능 :
흔히 알고 있는 대부분의 차량에 부착된 카메라+충격감지 센서 기반 녹화 솔루션이다.
이들 중에서 붉은색으로 표시한 1, 2, 3, 4, 5 는 자율주행을 시킬 때에만 필요한 기능들이다. 만약 자율주행을 할 것이 아니라면, 1~5 는 필요가 없다. 사람은 이런 기술 없이도, 두 눈알과 뇌만 가지고도 운전을 잘 한다.
스틸컷




아하! 킥보드에 자율주행 기술을 붙이려고 하고 있는 거구나!
그리고 한 10초정도 생각을 하다 보면 이런 의문들이 당연히 들게 된다.
•
기본적인 의문점들
1.
사람이 타고 있는 상태에서 어떻게 자율주행을 할 수 있을까..? 너무 위험하지 않을까..?
2.
사람이 없는 상태에서 움직이려면 균형을 잡아야 할 텐데, 두발로 어떻게 균형을 잡을 것인가..?
3.
어차피 두 발로 균형 못 잡으니까, 두 발 킥보드에서는 자율주행을 못 한다. 자율주행을 못 한다고 하면 기껏해야 저런 멋진 기술들은 ADAS (Advanced Driver Assistance Systems, 보행자 감지 자동 브레이크, 차선따라 가는 크루즈모드, 안전 등 여러 목적을 위한 위한 주행보조장치) 를 만들자고 저렇게 돈을 쏟아부어야만 할까..?
4.
킥보드 생김새를 상상해 보면, 카메라를 여러 대 달 수는 없을 것 같은데, 한두 대의 카메라만 가지고 뒷편까지 잘 보도록 만들 수 있을까..?
5.
킥보드에 붙여서 사용할 컴퓨터같은 연산장치나 카메라는 굉장히 비싸다. 반면, 공유 킥보드의 경우 파손 위험이 굉장히 높은데 어떻게 대량생산까지 끌어낼 수 있을까?
위와 같은 생각을 의문을 가진 사람이라면 이런 결론을 낼 수 있다.
에이, 또 보여주기식으로 만들었네!
나도 그정도 뿐이라고 생각했다면, 이 글을 쓰지도 않았을 것이다. 세그웨이가 빌 게이츠랑 스티브잡스가 사랑한 기업이라고 했다! 이들이 쓸데없는 것을 만드는 기업을 사랑할 리가 없다고 생각해 보는 것은 어떨까?
일단 이것에 대한 의문을 하나하나 풀어보기 전에 조금만 더 배경지식을 가지고 가도록 하자.
세그웨이는 위와 같은 영상을 만들기 앞서 아래 영상과 사진 같은 하드웨어/소프트웨어 를 만들었다고 선전했다.
T60 : 상용화를 꿈꾸는 세그웨이 세발 킥보드!
세 발이 된다면, 아래 기본 의문들 중 (2) 가 해결된다.
•
기본적인 의문점들
1.
사람이 타고 있는 상태에서 어떻게 자율주행을 할 수 있을까..? 너무 위험하지 않을까..?
2.
사람이 없는 상태에서 움직이려면 균형을 잡아야 할 텐데, 두발로 어떻게 균형을 잡을 것인가..?
3.
어차피 두 발로 균형 못 잡으니까, 두 발 킥보드에서는 자율주행을 못 한다. 자율주행을 못 한다고 하면 기껏해야 저런 멋진 기술들은 ADAS (Advanced Driver Assistance Systems, 보행자 감지 자동 브레이크, 차선따라 가는 크루즈모드, 안전 등 여러 목적을 위한 위한 주행보조장치) 를 만들자고 저렇게 돈을 쏟아부어야만 할까..?
4.
킥보드 생김새를 상상해 보면, 카메라를 여러 대 달 수는 없을 것 같은데, 한두 대의 카메라만 가지고 뒷편까지 잘 보도록 만들 수 있을까..?
5.
킥보드에 붙여서 사용할 컴퓨터같은 연산장치나 카메라는 굉장히 비싸다. 반면, 공유 킥보드의 경우 파손 위험이 굉장히 높은데 어떻게 대량생산까지 끌어낼 수 있을까?
1
2
3
4
5
흠, 이들은 왜 킥보드에 자율주행을 시키려고 하는걸까?
•
업계 사람이라면, 그리고 조금 공유킥보드 비즈니스가 어떻게 돌아가는지 눈여겨본 사람은 공유 킥보드를 사람들이 많이 타는 곳으로 이동시키고 (재배치) 수거해서 충전하는 일이 굉장히 돈이 많이 들어가는 일이라는 사실을 알고 있을 것이다.
◦
한 대당 재배치와 수거작업에 적게는 몇백 원에서 많게는 수천원 까지 비용이 들어간다.
◦
1 만대를 운영하는 킥보드 회사에서, 하루에 500 대의 재배치가 일어나야 하고, 대당 재배치 비용이 1000 원이라고 쳤을* 때 1달이면 1500 만원이다.
◦
1 만대 이상급 회사들이 대한민국에 총 7 개 있다고 치면 (빔, 라임, 씽씽, 킥고잉, 스윙, 디어, 지쿠터) 1달에 거의 1 억원에 가까운 재배치 손실이 일어나고 있는 셈이다.
•
또한 최근 공유킥보드들이 난립하면서 주차문제에 대해서 지적하는 사람들이 생겼고, 이에 대해서 아직 업계에서는 뾰족한 방법이 없다.
•
이러한 문제들을 기술로 풀어나가려는 시도를 세그웨이 (와 디어..) 에서 하고 있다.
•
그리고 무엇보다 인도와 자전거도로 중심의 자율주행은 개발이 활발히 이루어지지 않고 있고, 활용범위가 무궁무진하다.
*디어코퍼레이션 내부자료
참고. 사람들은 종종 킥보드라는 오브제를 활용해서 레디메이드 형태의 거리예술을 하곤 한다.
자 그럼, 이 내용을 통해 아래 기본 의문들 중 (1) 이 해결된다. 킥보드 자율주행은 사람 태우자고 만드는 게 아니다.
•
기본적인 의문점들
1.
사람이 타고 있는 상태에서 어떻게 자율주행을 할 수 있을까..? 너무 위험하지 않을까..?
2.
사람이 없는 상태에서 움직이려면 균형을 잡아야 할 텐데, 두발로 어떻게 균형을 잡을 것인가..?
3.
어차피 두 발로 균형 못 잡으니까, 두 발 킥보드에서는 자율주행을 못 한다. 자율주행을 못 한다고 하면 기껏해야 저런 멋진 기술들은 ADAS (Advanced Driver Assistance Systems, 보행자 감지 자동 브레이크, 차선따라 가는 크루즈모드, 안전 등 여러 목적을 위한 위한 주행보조장치) 를 만들자고 저렇게 돈을 쏟아부어야만 할까..?
4.
킥보드 생김새를 상상해 보면, 카메라를 여러 대 달 수는 없을 것 같은데, 한두 대의 카메라만 가지고 뒷편까지 잘 보도록 만들 수 있을까..?
5.
킥보드에 붙여서 사용할 컴퓨터같은 연산장치나 카메라는 굉장히 비싸다. 반면, 공유 킥보드의 경우 파손 위험이 굉장히 높은데 어떻게 대량생산까지 끌어낼 수 있을까?
1
2
3
4
5

참고 : 세그웨이 T60 - 최종적으로 세그웨이가 자율주행시키려는 모델
영상의 내용을 보면 알 수 있는 것들
•
영상을 보면 "응? 자율주행이 아닌데? 사무실에 앉아있는 사람이 유휴 킥보드를 키보드와 마우스를 통해 조종하고 있는데?" 라는 생각이 들 수 있다. 이렇게 인터넷을 통해 멀리 떨어진 기구가 움직이도록 리모컨으로 컨트롤하는 행위를 원격제어 라고 한다.
•
자율주행을 하려는 게 아닐 수 있겠구나. T60 lite 에서 보였듯, 자율주행에 필요한 기술들은 투자 유치용이고... "원격 제어, 킥보드 관제 시스템 등을 묶어 솔루션으로 팔려고 하는구나".
•
But, 다시 말하지만, 최종적으로 세그웨이가 하고자 하는 것은, 단순한 원격제어가 아니고 자율주행일 것이다.
•
위에서 언급했던 기술들을 상기해 보자.
T60 Lite 영상에 담겨 있었던 기술들 remind
자율주행을 할 것이 아니고, 원격 제어 용도로만 활용할거라면, 즉 사무실에서 킥보드를 조종해서 원하는 위치에 가져다놓고자 하는 것이 segway 의 방향성이었다면 이것들을 굳이 만들었을 필요가 없다!
생각해 보자, 어차피 사람이 화면 보고 게임하듯 조종할 건데 주행 영역은 뭐하러 검출하고 보행자는 뭐하러 검출하고, 거리는 뭐하러 계산하고 뭐 하러 내 위치를 파악하겠는가? 사람은 딱 보면 아는데!
•
이들의 최종 목표는 주차문제 해결과 수거재배치 문제를 한방에 해결할 수 있는 자율주행이다.
◦
그 자율주행을 하기 위해서는 당연히, 사무실에 앉아 있는 사람과 영상을 주고받고, 비상 상황에 킥보드를 제어할 수 있도록, 또는 완벽하게 자율주행이 되지 않는 지역 또는 아주 정교한 작업은 사람의 손이 필요할 수 있기 때문에, 사무실에 앉아 있는 사람이 조종을 하는 대로 움직일 수 있도록, 즉 신호를 주고받을 수 있도록 "통신을 뚫어" 두어야 한다.
•
자율주행을 하기 위해서는 원격제어가 필요하기 때문에 원격제어 기능이 먼저 개발되었을 뿐이다. 원격제어 기능은 자율주행 기능을 위해 반드시 필요한 기술이지만 조금 더 쉬운 기능이다. 따라서, 자율주행 기능이 개발되기 전에 공유킥보드 업체에게 원격제어가 탑재된 T60 삼륜 킥보드들을 팔아버릴 수도 있다.
•
그렇다면 위에서 언급했던 킥보드 재배치와 수거문제를 해결하고 싶었던 사람들, 주차 문제를 해결하고 싶었던 공유킥보드 업체들은 자율주행 기능이 동작하지 않더라고, 원격제어 서비스를 이용하기 위해 카메라가 부착된 T60 을 구매할 것이다.
•
어차피 모든 킥보드가 인터넷으로 연결되어 있다는 사실을 잊지 말자. 일단 T60 세발 킥보드를 팔고, 원격제어 기능만 제공하다가, 자율주행 기능이 완성되면 그것만 추가로 쏙 지원하면 된다. 킥보드는 비디오만 전송하고, 자율주행을 위한 인공지능 연산들은 클라우드에서 처리된다. 따라서 새로운 하드웨어로 교체할 필요도 없다.
◦
이들의 자율주행기술은 당연히 보행자가 다닐 수 있는 모든 노면에서, 자전거가 다닐 수 있는 모든 노면에서 다른 방식으로 서비스될 것이다. 이를 반증이라도 하듯, 이 글을 작성하고 한참 뒤인 2021년 9월 4일 세그웨이 종사자의 링크드인에 아래와 같은 글이 올라왔다.
세그웨이는 전 세계적으로 킥보드를 공급하는 기업이다. 한국에만 공유킥보드가 10만대쯤 있다 치면, 이런 국가가 10개만 되어도 100만대이다. 전세계에 돌아다니는 테슬라 차량 대수보다 지금 돌아다니는 공유킥보드 수가 더 많다. "차도" 에서 돌아다니기 위한 자율주행은 앞다투어 개발하지만, "인도와 자전거도로" 에서의 자율주행 효용가치는 블루 오션이다. 세그웨이는 이 점을 노린다. 만약 정말 segway 가 자율주행을 만드는 것이 맞다라고 한다면, 의문점들 중 (3) 이 해결된다. 이제 자율주행 킥보드 왜 만드냐고 헛소리하는 사람은 없겠지.
•
기본적인 의문점들
1.
사람이 타고 있는 상태에서 어떻게 자율주행을 할 수 있을까..? 너무 위험하지 않을까..?
2.
사람이 없는 상태에서 움직이려면 균형을 잡아야 할 텐데, 두발로 어떻게 균형을 잡을 것인가..?
3.
어차피 두 발로 균형 못 잡으니까, 두 발 킥보드에서는 자율주행을 못 한다. 자율주행을 못 한다고 하면 기껏해야 저런 멋진 기술들은 ADAS (Advanced Driver Assistance Systems, 보행자 감지 자동 브레이크, 차선따라 가는 크루즈모드, 안전 등 여러 목적을 위한 위한 주행보조장치) 를 만들자고 저렇게 돈을 쏟아부어야만 할까..?
4.
킥보드 생김새를 상상해 보면, 카메라를 여러 대 달 수는 없을 것 같은데, 한두 대의 카메라만 가지고 뒷편까지 잘 보도록 만들 수 있을까..?
5.
킥보드에 붙여서 사용할 컴퓨터같은 연산장치나 카메라는 굉장히 비싸다. 반면, 공유 킥보드의 경우 파손 위험이 굉장히 높은데 어떻게 대량생산까지 끌어낼 수 있을까?
1
2
3
4
5
자율주행과 딥러닝에 관심이 있는 사람이라면, 이 주장에 대해서 동의하지 못할 수 있다. 당연히 단순히 영상을 수집하는 디바이스가 많다고 해서 딥러닝이 되고 자율주행이 되는 것은 아니다. 이 내용은 하단에 별도로 서술하겠다.
자율주행 다 떼고 원격제어만 해도 충분히 재배치/수거에 들어가는 인건비를 충분히 줄일 수 있지 않을까? 라는 생각이 들 수 있다. 물론, 세그웨이는 풍부하게 모여진 퍼스널모빌리티 중심의 데이터들을 활용해 현재 수많은 기업들이 시도하는 차량 자율주행과 차별화되는 무인동체 시장을 개척할 수 있는 독보적인 입지를 가져갈 수 있게 된다. 이런 신사업의 관점을 다 떼어놓고, 당장 운영에 있어 원격제어에 비해 비용을 얼마나 절약할 수 있을까에 대한 내 생각에는 "그럴수도 있고 아닐수도 있고" 이다. 이 내용에 대해서도 하단에 보충 서술하겠다.
카메라에 대한 제약사항
앞서 말했듯 영상을 보면 카메라에 들어온 영상을 보고, 사람이 손으로 사무실에 앉아서 멀리 있는 킥보드를 움직일 듯하다. 하지만 이렇게 쉬워 보이는 - 카메라에 대해서도 나눌 수 있는 이야기가 상당히 많다. 나는 개인적으로 세그웨이의 카메라 위치 선정에 굉장히 깊은 인상을 받았다.
•
기본적인 의문점들
1.
사람이 타고 있는 상태에서 어떻게 자율주행을 할 수 있을까..? 너무 위험하지 않을까..?
2.
사람이 없는 상태에서 움직이려면 균형을 잡아야 할 텐데, 두발로 어떻게 균형을 잡을 것인가..?
3.
어차피 두 발로 균형 못 잡으니까, 두 발 킥보드에서는 자율주행을 못 한다. 자율주행을 못 한다고 하면 기껏해야 저런 멋진 기술들은 ADAS (Advanced Driver Assistance Systems, 보행자 감지 자동 브레이크, 차선따라 가는 크루즈모드, 안전 등 여러 목적을 위한 위한 주행보조장치) 를 만들자고 저렇게 돈을 쏟아부어야만 할까..?
4.
킥보드 생김새를 상상해 보면, 카메라를 여러 대 달 수는 없을 것 같은데, 한두 대의 카메라만 가지고 뒷편까지 잘 보도록 만들 수 있을까..?
5.
킥보드에 붙여서 사용할 컴퓨터같은 연산장치나 카메라는 굉장히 비싸다. 반면, 공유 킥보드의 경우 파손 위험이 굉장히 높은데 어떻게 대량생산까지 끌어낼 수 있을까?
처음부터 가졌을법한 이 의문점들(4, 5) 이 제시하듯, 카메라 디바이스 그 자체의 비용에 대한 문제도 있고 더구나 자율주행을 해야 한다면, 그냥 아무데나 카메라를 달아서 AI 로 자율주행시키면 안 되는거야? 가 아니란 말이다.
카메라의 위치 선정에 대한 문제
•
자율주행 기술과 딥러닝에 관심이 있는 사람이라면 특히 카메라의 위치, 카메라가 보는 각도, 카메라가 볼 수 있는 영역 (FOV) 만으로도 자율주행 기능들의 성능에 큰 영향을 미친다는 사실을 알 수 있을 것이다. 위치와 성능을 어떻게 잘 잡아낼 것인가?
•
알다시피 전동킥보드, 공유킥보드 정말정말 험하게 탄다. 다양한 전자 장비들과 배터리는 킥보드의 철근과 몸통 속에 꽁꽁 숨긴다 쳐도, 카메라는 필수적으로 밖으로 돌출되어 있어야 하는 운명이 아닌가?
◦
이 카메라가 다치지 않도록 어떻게 지켜낼 것인가?
◦
카메라 렌즈에 물방울이 맺혀서 왜곡된 이미지를 안 보게 하려면 어디에 달아야 할까?
◦
너무 낮은 위치에 있으면, 볼 수 있는 영역이 제한된다.
◦
너무 높은 위치에 있으면, 바로 발 아래 노면상태를 들여다볼 수가 없다. 킥보드를 타 본 사람은 알겠지만, 조금만 턱이 있어도 자빠져 버리지 않는가. 자율주행 킥보드도 마찬가지이다.
카메라의 대수와 비용에 대한 문제
•
카메라는 생각보다 저렴하지 않다.
•
특히 자율주행과 원격제어정도를 하는데, 태양빛이 사방팔방에서 내리꽂히는 실제 세상에서 적절히 노출값도 잡아 주어야 하고, 초점도 풀리면 안 된다. 그러면서도, 어느정도 해상도도 뽑아 주어야 한다. 그런데 이런 카메라는 몇천원 단위가 아니라 몇 만원 단위다.
•
테슬라같은 차들에 10만원짜리 카메라 10대를 붙여도 전체 차 가격 5000만원의 1% 도 차지하지 않는다. 양산을 하게 된다면 그 비용은 더 떨어질 것이다.
•
하지만 킥보드는 어떤가? 이제는 너무나도 익숙한 공유킥보드에 가장 많이 사용되는 모델인, 그웨이 나인봇 맥스 플러스 모델의 판매가는 80만원~100만원 대로 형성되어 있다. 여기에 10만원짜리 카메라는 한 대만 하더라도, 킥보드 한 대 가격의 10% 나 차지하게 되는 것이다.

참고 : 세그웨이 나인봇 맥스 - 전세계 공유킥 중 가장 많이 나가는, 가장 안정성이 보장된 세그웨이 플래그십

세그웨이의 해결방법
카메라의 위치

헤드 아래 살짝 숨겨져 있는 광각 카메라 모듈
•
세그웨이 T60 과 T60 lite 를 보자. 둘은 동일한 헤드를 사용하고 있음을 알 수 있다.
•
둘은 모두 저렇게 헤드 바로 아래 카메라가 장착돼 있다. 정말 어지간한 사고를 내는 것이 아니고서야 카메라가 손상될 수 없는 위치이다. 어떻게 하면 저 부분을 다치게 만들 수 있을까.
•
실제로 받아서 하드웨어를 확인해본 결과, 저 카메라가 붙어 있는 대가리 속에는 렌즈만 톡 튀어나온 채로 전부 튼튼한 사각형 모양의 쇳덩어리 케이스로 감싸진 소형 컴퓨터가 하나 들어가 있다는 사실을 확인했다.
카메라의 대수
•
세그웨이가 카메라를 저 위치에 배치하면서 고민했어야 하는 요소는 세 가지이다.
1.
카메라를 어떻게 안 상하게 할까?
2.
어떻게 최소 개수의 카메라만 설치할 수 있을까?
3.
어떻게 후방을 볼 수 있게 할 수 있을까?
•
여기서 1은 카메라를 저곳에 배치하면서 해결됐다.
•
여기서 2와 3은, 영상에서 보다시피, 초광각 렌즈를 사용함으로써 한 방에 해결했다. 특히 헤드 부분이 저렇게 삼각형으로 생긴 이유는 "초광각 렌즈를 통해 후방까지 한 방에 볼 수 있도록 하기 위해서" 라고 추측할 수 있다. 저렇게 삼각형으로 만들면서, 구조적 안정성 - 디자인 - 1개 카메라의 4면 커버를 모두 잡을 수 있게 되었다. 정말 엄청난 센스가 아닐 수 없다.

망원

광각

초광각 (fisheye)

이를 통해 (4) (5) 의 문제를 해결했다고 볼 수 있다.
•
기본적인 의문점들
1.
사람이 타고 있는 상태에서 어떻게 자율주행을 할 수 있을까..? 너무 위험하지 않을까..?
2.
사람이 없는 상태에서 움직이려면 균형을 잡아야 할 텐데, 두발로 어떻게 균형을 잡을 것인가..?
3.
어차피 두 발로 균형 못 잡으니까, 두 발 킥보드에서는 자율주행을 못 한다. 자율주행을 못 한다고 하면 기껏해야 저런 멋진 기술들은 ADAS (Advanced Driver Assistance Systems, 보행자 감지 자동 브레이크, 차선따라 가는 크루즈모드, 안전 등 여러 목적을 위한 위한 주행보조장치) 를 만들자고 저렇게 돈을 쏟아부어야만 할까..?
4.
킥보드 생김새를 상상해 보면, 카메라를 여러 대 달 수는 없을 것 같은데, 한두 대의 카메라만 가지고 뒷편까지 잘 보도록 만들 수 있을까..?
5.
킥보드에 붙여서 사용할 컴퓨터같은 연산장치나 카메라는 굉장히 비싸다. 반면, 공유 킥보드의 경우 파손 위험이 굉장히 높은데 어떻게 대량생산까지 끌어낼 수 있을까?
1
2
3
4
5
위 사실들을 바탕으로 왜 세그웨이가 T60 런칭에 앞서 T60 lite 을 만들었어야만 했는지 추론해 보자.
T60으로 자율 주행 소프트웨어를 판매하려면 결국 초광각 카메라 하나로도 “잘 돼야” 한다.
그렇기에 이런 산들을 넘어가야 한다.
기술적인 측면
•
초광각 렌즈로 본 wild 오픈 데이터셋이 충분히 없다 (진짜로 많이 없음) 오픈 데이터셋이 충분히 있다고 하더라도, 초광각 렌즈로 본 wild 데이터 수집은 언제부턴가는 무조건 해야 한다.
•
아직 자율주행이 잘 되지 않는 디바이스인 삼발이 T60 을, 공유킥 업체들에게 구매할 이유가 없다. 또한 판매하기에는 가격이 너무 비쌀 것이다.* 게다가 세 발에 대한 폼팩터가 익숙하지 않아서 공유킥 업체들이 구매하는 것까지는 시간이 오래 걸릴 것이다. (기회비용)
•
더구나 지금은 자율주행도 안되고, 사람이 일일이 컨트롤해야 한다는 허들이 하나 더 있음. 자율주행이 되면 모를까, 두배는 비싼 가격이 될텐데 저걸 사지 않을 것이다.
•
그럼 일단 테슬라처럼 카메라가 붙은 모빌리티를 쫙 뿌림. 그 모델은, 나인봇맥스 플러스와 비슷하게 생긴.. 영상에 등장하는 T60 라이트 모델이 될 가능성이 높음.
•
그 이유는, 기존 나인봇 맥스플러스랑 같은 하드웨어에 대가리만 바꿔서 카메라를 끼울 수 있기 때문. 우리 그때 세그웨이 분해해 보았듯이, 그 대가리만 달랑달랑 모듈형으로 교체가 가능했음. 가격차이가 얼마 안나기 때문에, 공유킥 업체들이 그냥 맥스플러스 안사고 저걸 삼. (어쩌면 맥스플러스를 단종시켜버릴지도.)
•
우리한테도 있었던 이슈를 잘 생각해보면 카메라 위치가 조금 달라도 성능이 팍 꺾여버렸지만 정확히 저 위치에 달린 카메라에서 실제데이터를 얻으며 학습시키면 성능은 웬만한 일반카메라보다 상당히 더 좋을거라고 생각함.
*그렇다고 데이터를 수집하기 위해 데이터를 모아 주는 Amazon Mechanical Turk 나 AI Platform Data Labeling Service 를 이용하기에는 들어가는 비용에 비해 나오는 데이터의 양이 적고, 임시 방편일 뿐이라는 한계가 있다. (지속적으로 데이터를 사야 하기 때문에, 굉장히 한시적인 방편이다.) 세그웨이가 이렇게 직접 만든 하드웨어들을 통해 데이터를 받아오려는 큰 그림을 그릴 수 있는 것은, 엄청난 하드웨어를 이미 전 세계에 뿌리고 있는 회사이기 때문이다. 마치 구글이 스마트폰을 통해 항상 우리의 말소리를 들으면서 관심사를 알아맞추는 데 그 데이터를 사용하는 것과 비슷한 맥락이다.



참고 : 세그웨이 T60 lite - 딱 봐도 나인봇 맥스랑 겁나 비슷하게 생겼다. 세그웨이 맥스 플러스와 몸통은 똑같고, T60 과 헤드는 똑같다. 이들의 접근을 보면, 기존의 부품들을 최대한 활용하면서 일부 모델에 쉽게 탈착 가능하도록 만들려고 한다는 사실을 알 수 있다. 정말 똑똑하다.
위에서 잠깐 언급했던 이 내용에 대한 스포가 되기도 한다.
자율주행과 딥러닝에 관심이 있는 사람이라면, 이 주장에 대해서 동의하지 못할 수 있다. 당연히 단순히 영상을 수집하는 디바이스가 많다고 해서 딥러닝이 되고 자율주행이 되는 것은 아니다. 이 내용은 하단에 별도로 서술하겠다.
이 내용을 기억하는가?
•
자율주행을 하기 위해서는 원격제어가 필요하기 때문에 원격제어 기능이 먼저 개발되었을 뿐이다. 원격제어 기능은 자율주행 기능을 위해 반드시 필요한 기술이지만 조금 더 쉬운 기능이다. 따라서, 자율주행 기능이 개발되기 전에 공유킥보드 업체에게 원격제어가 탑재된 T60 삼륜 킥보드들을 팔아버릴 수도 있다.
•
그렇다면 위에서 언급했던 킥보드 재배치와 수거문제를 해결하고 싶었던 사람들, 주차 문제를 해결하고 싶었던 공유킥보드 업체들은 자율주행 기능이 동작하지 않더라고, 원격제어 서비스를 이용하기 위해 카메라가 부착된 T60 을 구매할 것이다.
•
어차피 모든 킥보드가 인터넷으로 연결되어 있다는 사실을 잊지 말자. 일단 T60 세발 킥보드를 팔고, 원격제어 기능만 제공하다가, 자율주행 기능이 완성되면 그것만 추가로 쏙 지원하면 된다. 킥보드는 비디오만 전송하고, 자율주행을 위한 인공지능 연산들은 클라우드에서 처리된다. 따라서 새로운 하드웨어로 교체할 필요도 없다.
경제적인 측면
2021년 현재, 공유 킥보드를 이용하는 유저들은 브랜드를 보고 이용하지 않는다. 공유 킥보드의 승차감을 따지지도 않는다. 안정성? 주행성능? 시인성? 모두 똑같다. 앞서 보았듯이 전부 동일한 킥보드를 사용하기 때문이다. 따라서 공유킥보드 업체 입장에서 자사 공유킥보드 기체를 결정하는 요인은 99% 가격이라고 보면 된다. 이것은 아주 중요한 사실이다. 이로부터 중요한 정리를 도출할 수 있다.
공유킥보드 사업자 입장에서는 운영 비용을 절약할 수 있는 금액에 기회비용을 더한 금액이 그대로 구매의사에 반영된다. 더 좋은 기능, 더 안정성 있는 하드웨어, 더 널널한 배터리와 같은 요소들도 전부 운영 비용을 절약할 수 있는 금액에 포함시킬 수 있고, 이들은 대부분 비용으로 측정 가능하므로 가격에 더욱 민감할 수밖에 없다.
쏘카와 그린카의 구도처럼 어차피 내 브랜드 너 브랜드 할것없이 가까이 있는 것 또는 조금 더 싼거 잡고 타는게 전동킥보드 공유서비스의 특징이기 때문에, 더 많은 킥보드를 더 싸게 운영할 수 있는 것이 장땡이다.* 정말 웬만한 기업들 사이에서는 적용되기 어려운 가격-수요 모델이 곧이곧대로 들어맞기 쉬운 곳이라는 말이기도 하다.
*참고 : swing 이라는 전동킥보드 공유 서비스는 자신의 모빌리티들은 브랜드 인지도가 있는 프리미엄 서비스가 되기를 바라는 마음이라고 한다. 이런 "더 싸게, 더 많이" 구도를 부수고 싶어하는 것 같은데, 어떻게 접근할지 귀추가 기대된다.
그런 공유킥보드 업체에게 킥보드를 판매하는 세그웨이 나인봇은 그럼 어떻게 돈을 벌어야 할까?
세그웨이는 다양한 성능의 라인업을 출시함으로써 가격 삼각형이 아니라 가격 사각형을 설계할 수 있었다.
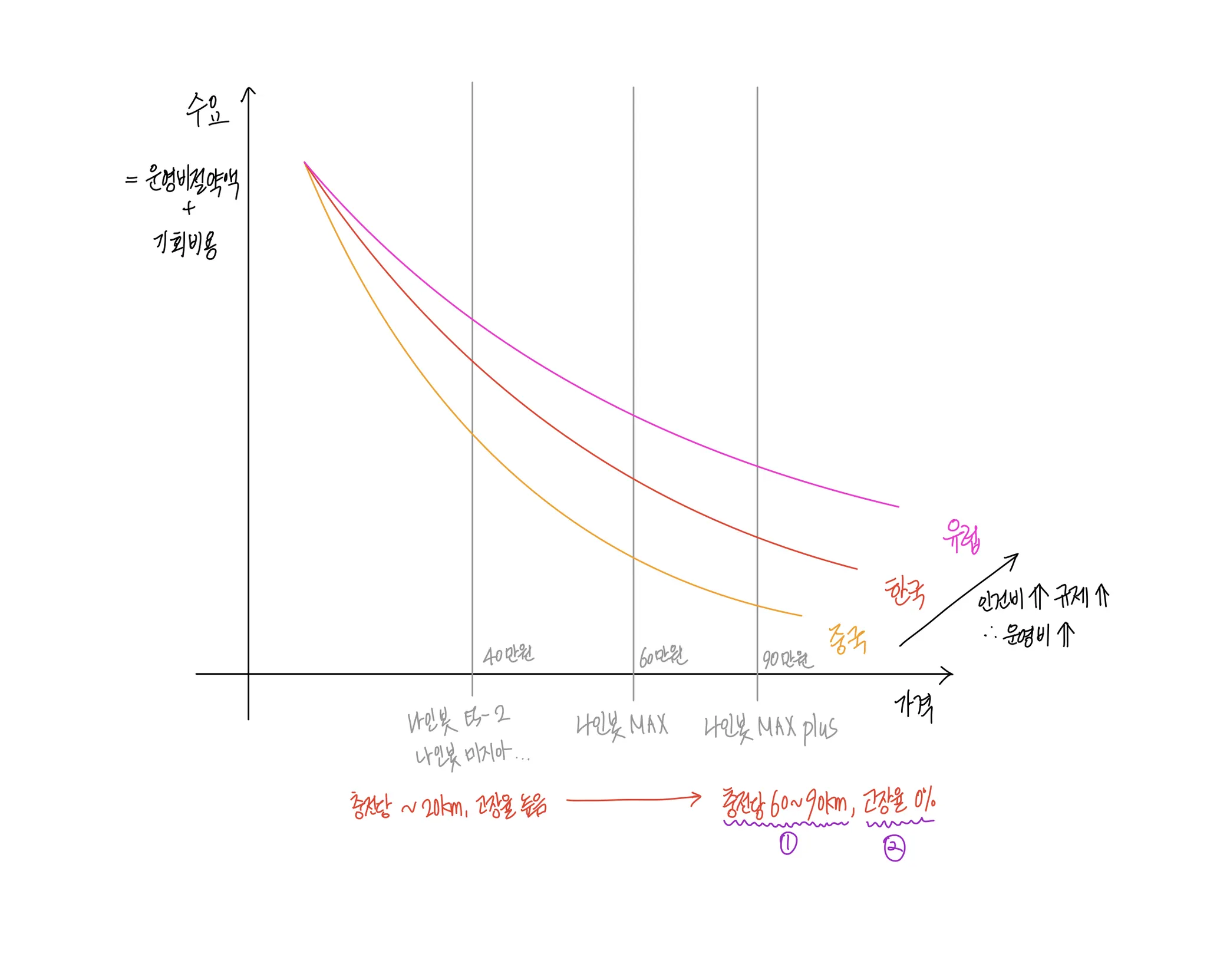
하지만 더이상 갈 곳이 없다. 더 좋은 기구를 만든다는 것은 배터리의 밀도를 높이고 더 높은 용량의 안전한 배터리를 만드는 것이고, 고장률이 낮은 기구를 만드는 것이다. 계속 발전되는 하드웨어 덕분에, 1회 충전당 이동거리는 60km 를 넘어섰으며, 하드웨어 자체 결함에 의해 고장나는 건수는 0%에 수렴한다. 정말 탱크같은 성능을 자랑하는 나인봇 MAX Plus 공유 킥보드는 하드웨어 내구도에 있어 공유 킥보드 기구 발전의 마지노선일 것이라고 추측한다.
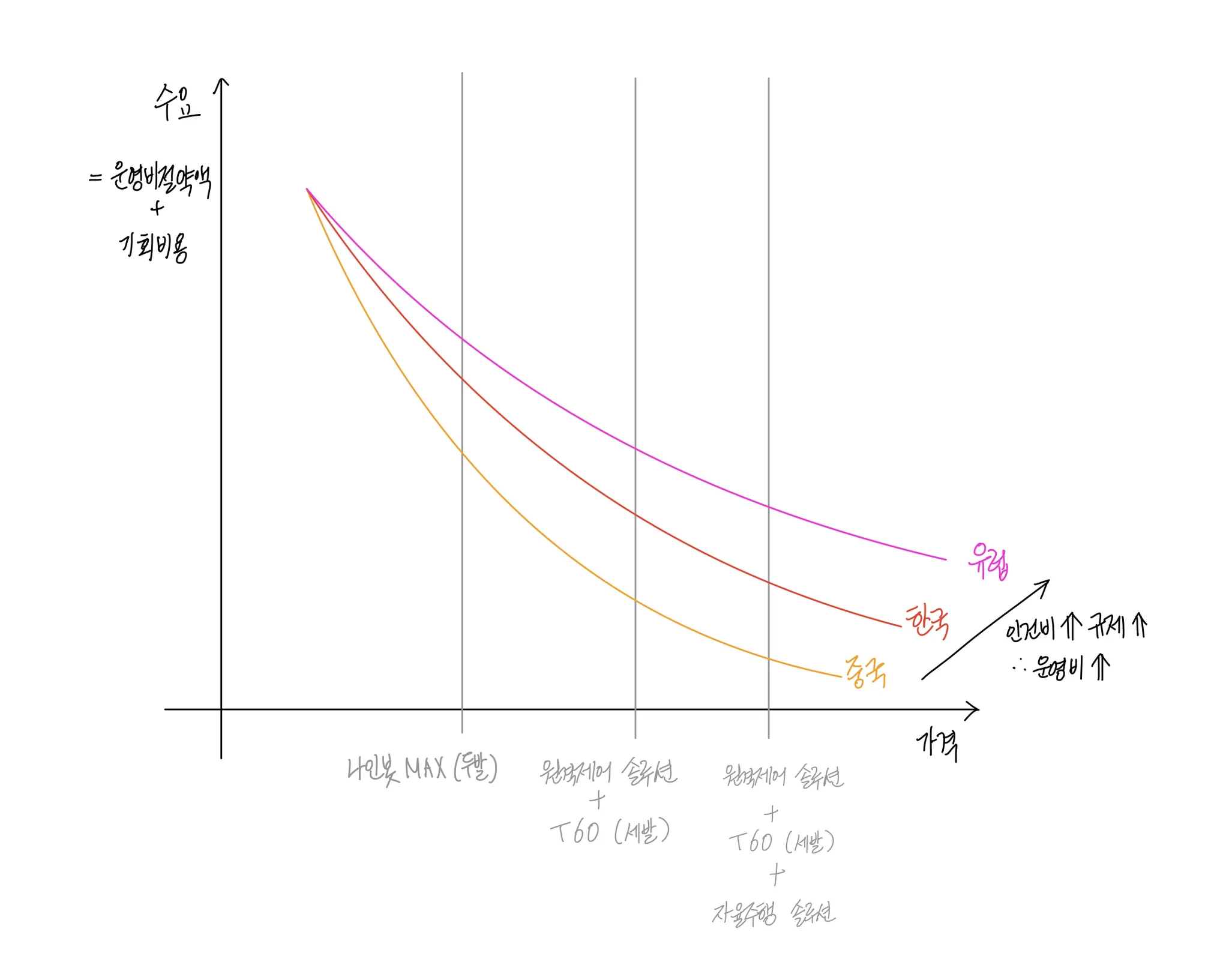
하드웨어만으로는 더 이상 비싼 라인업을 만들 수 없다. 답은 소프트웨어에서 찾으려고 할 것이다.
글의 상단에서 이 내용을 짧게 언급했다.
자율주행 다 떼고 원격제어만 해도 충분히 재배치/수거에 들어가는 인건비를 충분히 줄일 수 있지 않을까? 라는 생각이 들 수 있다. 물론, 세그웨이는 풍부하게 모여진 퍼스널모빌리티 중심의 데이터들을 활용해 현재 수많은 기업들이 시도하는 차량 자율주행과 차별화되는 무인동체 시장을 개척할 수 있는 독보적인 입지를 가져갈 수 있게 된다. 이런 신사업의 관점을 다 떼어놓고, 당장 운영에 있어 원격제어에 비해 비용을 얼마나 절약할 수 있을까에 대한 내 생각에는 "그럴수도 있고 아닐수도 있고" 이다. 이 내용에 대해서도 하단에 보충 서술하겠다.
인건비, 규제, 운영비 등 어떤 관점으로 보든 상관없이, 어떤 국가에서는, 원격제어 기능은 필요하지만 자율주행이 아니라 원격제어만 되더라도 충분하다고 느낄 수 있고 어떤 국가에서는 자율주행까지 요구하는 경우가 많을 수 있다. 어떤 국가에서는 그런 것 다 필요없고 그냥 킥보드만 있으면 된다고도 할 것이다. 삽으로 눈을 퍼내는 군인처럼, 인건비가 더 싸다면 충분히 그런 경우가 존재할 수 있다. 여기서 다시 가격사각형을 만들어낼 요소들이 존재한다.
264p, 비선형 가격구조를 적용할 때 경계해야 하는 것은, (1) 고객 불만족 (2) 차익거래 (3) 가격 울타리*이다. 라고 알려져 있지만, 세그웨이의 경우에는 그 어느 경우에도 해당하지 않는다. 정말 엄청난 접근이다. 세그웨이는 국가별로 완벽하게 가격 울타리를 세울 수 있고, 고객은 자신에게 적절한 서비스를 선택하면 되는 것이기 때문에 고객 불만족을 겪을 리 없다. SaaS (Software as a Service) 이기 때문에 차익거래에 대한 걱정도 없다.
하지만 한가지 더 고려해야 할 것이 있다.
데이터의 관점에서
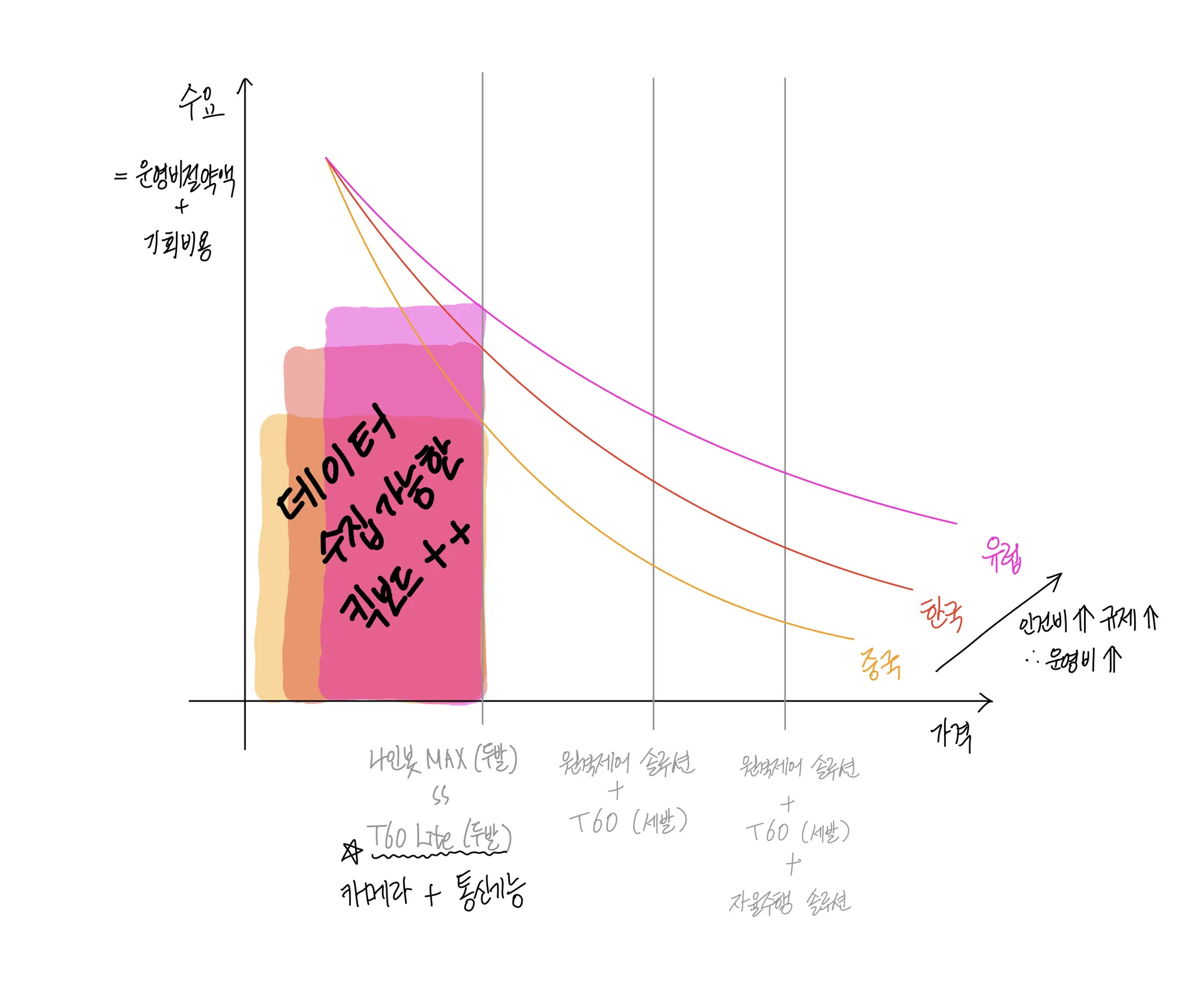
사각형은 각 국가에서 서비스하는 사업자들의 일부 수요와 그에 따른추가적인 공급양을 나타낸다. 사각형의 면적은 세그웨이가 T60 단일모델을 운영하는 것이 아니라, T60Lite 의 하드웨어로 Ninebot Max 이 하는 역할을 완전히 대체하도록 만들 경우 세그웨이가 얻어낼 수 있는 추가적인 카메라 데이터를 의미한다.
따라서 나의 결론은, 나인봇 MAX plus 와 최대한 동일한 폼팩터이자 검증된 폼팩터를 사용해서 원가를 최대한 유지시키고, 고객에게 추가되는 비용도 없도록 만들어서, T60 Lite 대신 나인봇 MAX plus 를 선택할 이유가 없도록 만든다. 그렇다면 당연히 고객은 T60 Lite 모델을 선택하게 될 것이다. 그렇게 된다면 T60을 구매한 고객들뿐 아니라, 나인봇 MAX plus 를 구매했을 고객들에게도 즉 위 그래프에서 색칠된 만큼의 카메라 데이터, 주행 기록 데이터를 추가로 수집할 수 있게 되는 것이다.

그래서 T60 lite 는 이름에서부터 느껴지듯이 그냥 정찰용 오버로드같은 녀석일 뿐임. 그렇게 엄청나게 깔려버린 하드웨어들로 데이터를 열심히 모을 수 있게 됨.어떤 데이터를 모으냐면,
•
인간의 제어형태를 label 삼아 False Negative 상황들 수집
•
인간행동 모방 학습을 위한 주행로그 수집
첨언하자면, 이 과정은 마치 테슬라가 지금 돌아가는 메커니즘과 비슷해 보인다. Tesla 는 False Negative 데이터들을 끊임없이 수집하고, 이를 바탕으로 모델을 재학습시킨다. 이때 카메라에 찍힌 영상들이 전부 다 테슬라의 데이터센터로 보내지기 때문에, 프라이버시 이슈가 굉장히 굉장히 많이 나오는 것이다. 하지만 딥러닝으로 만든 모델이 정상적으로 동작 하려면 이 정도는 기본이다. 이렇게 자동으로 데이터가 축적되는 과정을, 정부에서 프라이버시라는 이유만으로 막아버리는 것은, 그냥 딥러닝을 하지 말라는 이야기와 다를 것이 없다. 결국 이 프라이버시 이슈도 언젠가는 당연한 듯 사라질 것이다.
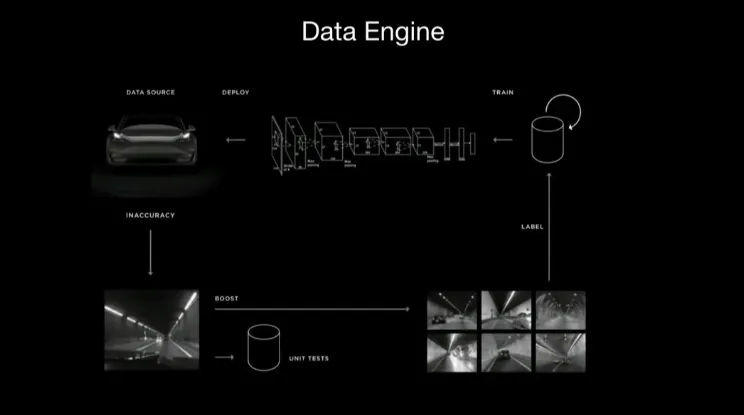
tesla 의 data engine
그래서 어쩌면 미래에는 이렇게 될수도 있을것 같다.
•
세그웨이가 원격제어+자율주행 솔루션을 판매
•
데이터를 전부 모은 세그웨이가 자율주행 기술을 독점하고 아예 직영 공유킥보드를 해버림
세그웨이가 데이터를 모을 수 있다는 것은 어떻게 유추할 수 있냐면,
T60 의 주행 중인 카메라에 담긴 영상들은 우리가 흔히 아는 zoom 을 통해 스트리밍된다.
T60 → zoom → 고객사 가 되든 T60 → 세그웨이 서버 → zoom → 고객사 가 되든,
어쨌든 영상은 zoom 이나 세그웨이 서버를 거쳐가게 된다.
이 데이터들은 고스란히 세그웨이 소유가 된다.
디어가 생각하는, 자율주행을 통해 만들어나가려는 해자(moat) 가 진짜 해자인가?
•
디어는 자율주행 기술을 개발해서 이것을 비단 킥보드뿐 아니라 다양한 것에 접목시도를 해 보는 것을 최종 목표로 하고 있다.
•
세그웨이는 인도 - 차도를 막론하고 정말 어마어마한 데이터를 수집하게 된다. 이들은 그냥 킥보드를 팔면, 킥보드 하나하나마다 엄청난 데이터가 쏟아져 들어오게 되는 것이다.
•
이미 그 상태가 되어 버린다면, 그 솔루션을 뛰어넘을 수는 없다.
•
아직 공유킥보드 업체들이 세그웨이보다 강한 점은, 킥보드를 실제 필드에서 운영할 능력이 있다는 것이다.
•
과연 세그웨이에 대한 deer 의 해자가 무엇일까?
기타 이와 관련된 것들
•
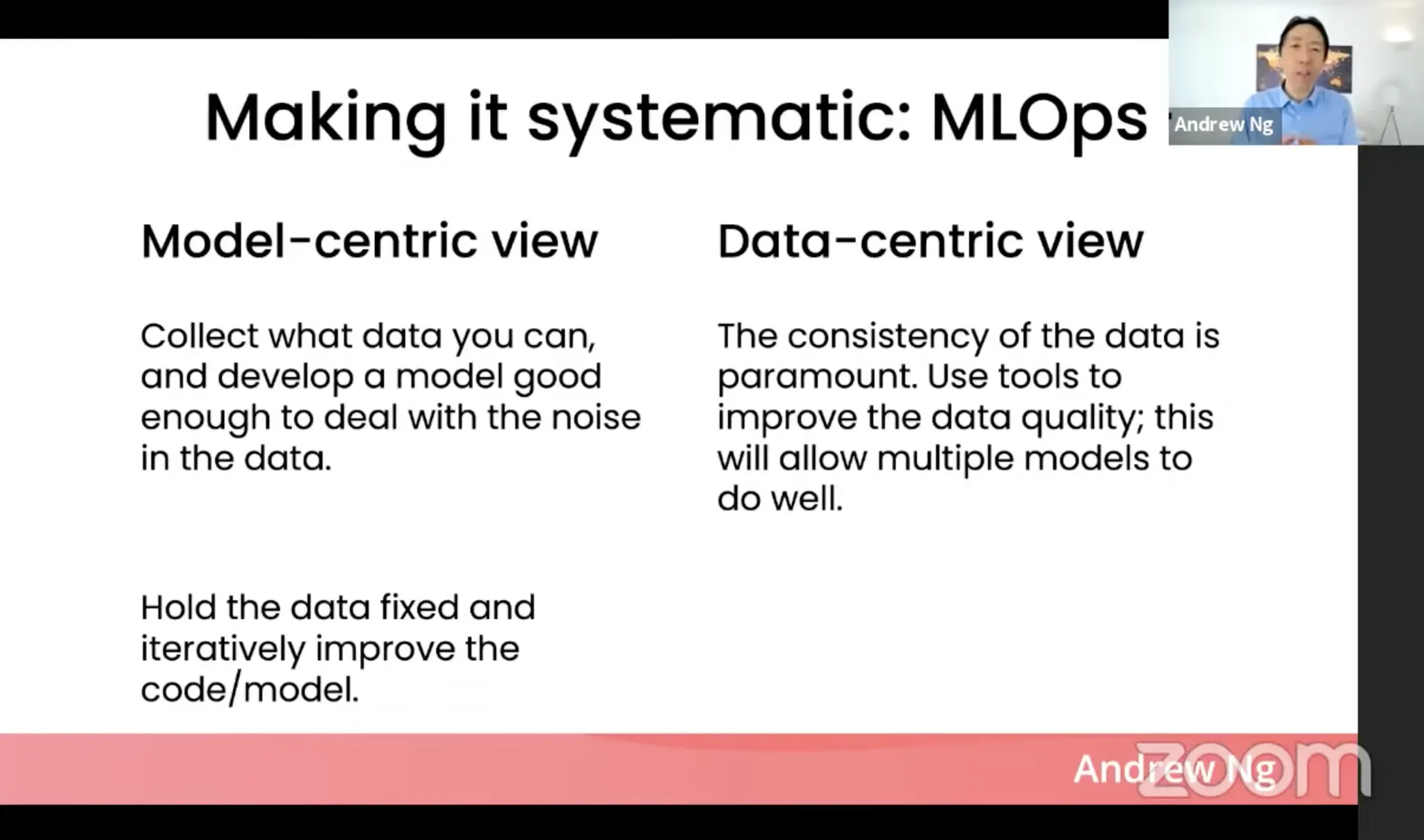
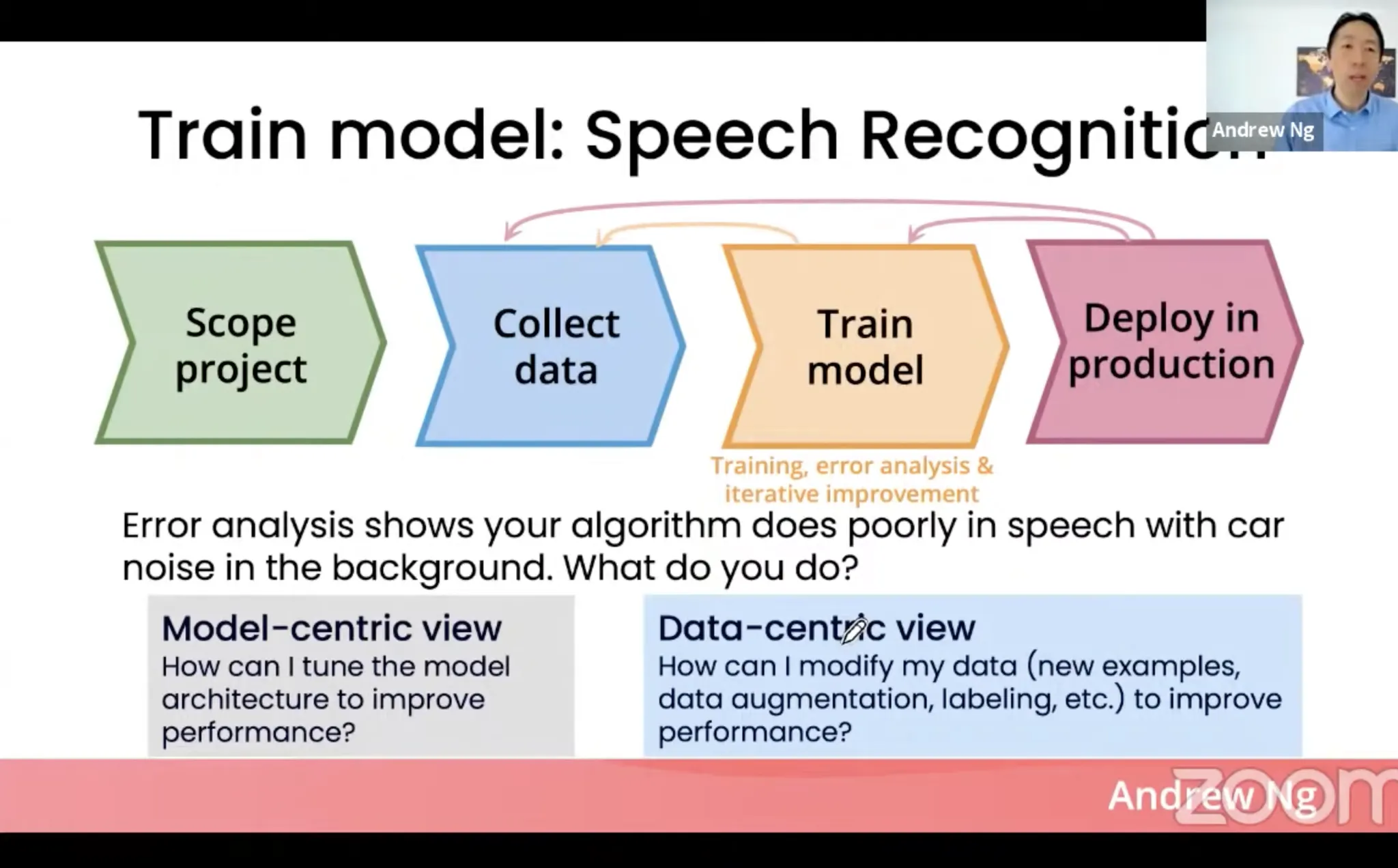
관련된 기술에는 MLOps (관련자료 : ITV : [MLOps] MLOps 에 대한 간단한 이해부터, 현직자 인터뷰! (내가 닥친 문제에 적용할 수 있는건가, 할 수 있는건가 확인하기)) 가 있다.
ITV : [MLOps] MLOps 에 대한 간단한 이해부터, 현직자 인터뷰! (내가 닥친 문제에 적용할 수 있는건가, 할 수 있는건가 확인하기)) 가 있다.•
관련된 문제에는 세그웨이가 이걸 너무 잘하면 내가 실직을 할 수 있다는 점이 있다.
•
UX 측면도 고려를 한 것 같다. 세그웨이 T60 을 보면 좌우 깜빡이가 붙어 있는데, 이는 자율주행 킥보드가 어느 방향으로 갈지 뒤 사람에게 충분히 인지를 시켜줄 필요가 있다는 사실을 의식했을 듯하다. 문득 네이버랩스의 어라운드 를 보면, 로봇의 진행방향에 대한 UX 를 설계할 때 디스플레이에 눈 모양을 그려넣었었다는 사실이 떠올랐다.

좌회전을 하려는 naverlabs 의 자율주행 로봇 around 의 모습이다. 눈을 그려넣은 디스플레이를 보면 자신이 이동하려고 하는 방향으로 쏠려 있다.
세그웨이 직원 조사중...
Director, Software Development at Segway Inc.
Senior Software Engineer at Segway
buaa — 学生

Sr. Software Engineer at Segway
IT Manager at Segway
Mechanical Technician at Segway







