
전체적인 과정은 다음과 같다.
1.
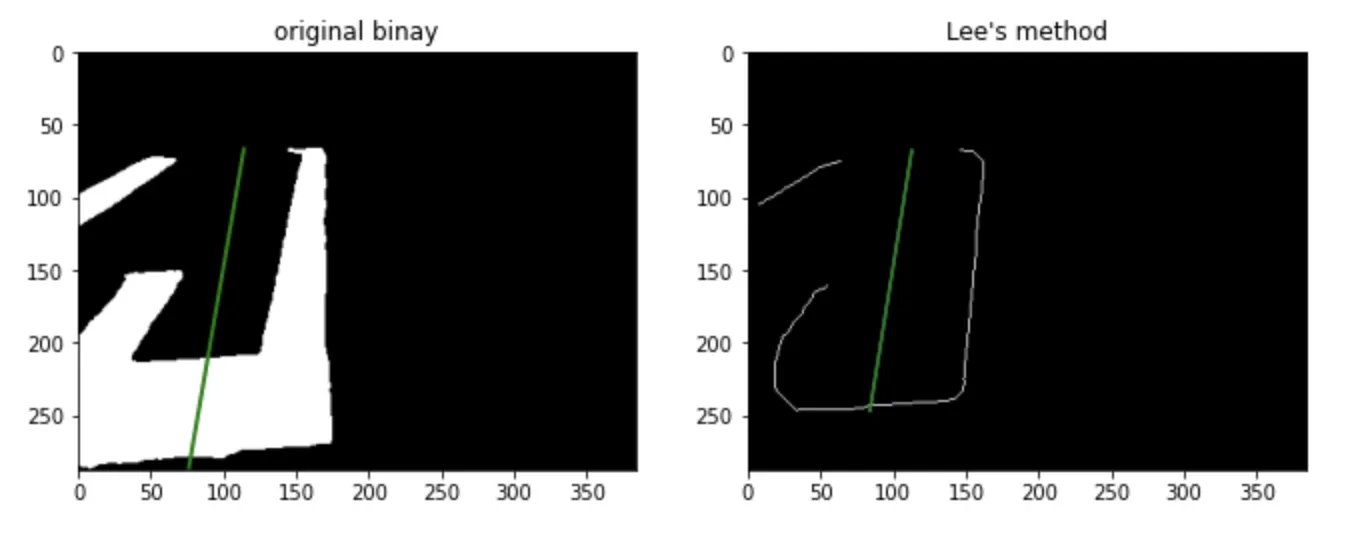
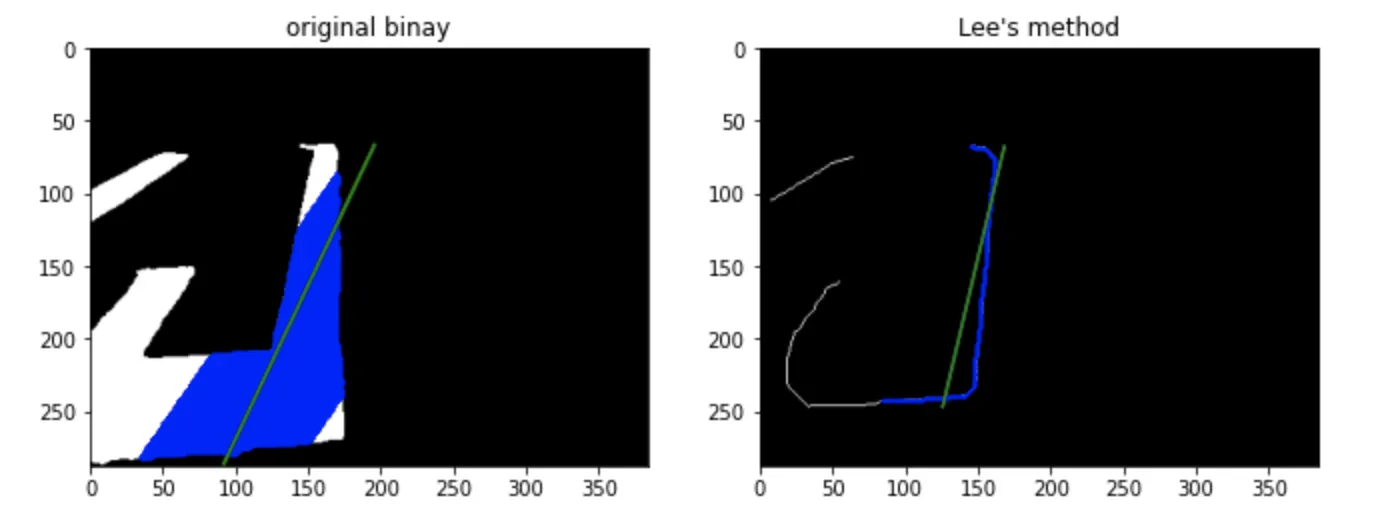
binary image 에 골격화 처리를 한다.
2.
직진이므로 직선을 fitting 한다.

a.
보다 정밀하게 하고자 한다면, 노이즈에 robust 하게 만들어주는 RANSAC 알고리즘을 사용한다.
linear 적용
ransac 적용
3.
Cond1. 근거리에서 점자블럭으로 인식된 픽셀의 수가 threshold 개를 넘겨야 함. 휴리스틱
a.
보다 정밀하게 하고자 한다면, GPS 오차범위 내에서 거리제한을 두면 됨.
4.
Cond2. 직선의 coef 와 절편을 구하고, 해당 값이 N 개 프레임 이상동안 '충분히 안정적' 이라고 할 수 있을 만큼 변화폭이 크지 않아야 함.
a.
'변화폭이 크지 않다' 에 대한 정의도 threshold 로 정의함. 휴리스틱
i.
보다 정밀하게 하고자 한다면, 변화폭이 클 때 조금 더 robust 한 알고리즘
1.
볼 수 있는 최대 거리를 줄여 가며 p 번 시도해 보고 '충분히 안정적' 이라고 할 수 있는 상황이 나타나는지 확인한다.
2.
볼 수 있는 좌우 폭을 줄여가며 q 번 시도해 보고 '충분히 안정적' 이라고 할 수 있는 상황이 나타나는지 확인한다.
5.
Cond3. 빛이 사영되는 특성을 고려했을 때, 동체가 바라보는 방향과 직선의 방향이 충분히 '평행' 하다고 여겨져야 함.
a.
이것은 '소실점' 과 관련이 있음 (참고2).
6.
Cond4. RANSAC 의 inlier 비율이 일정 threshold 비율을 상회해야 함. 휴리스틱
7.
Cond1 & Cond2 & Cond3 & Cond4 이면 이것은 '직진하는 인도에서 모두 보이는 것' 이다.
8.
이 경우, heading 의 방향과 global path 의 heading 을 점자블럭의 방향과 동기화시킬 수 있다.
골격화 처리를 하는 이유
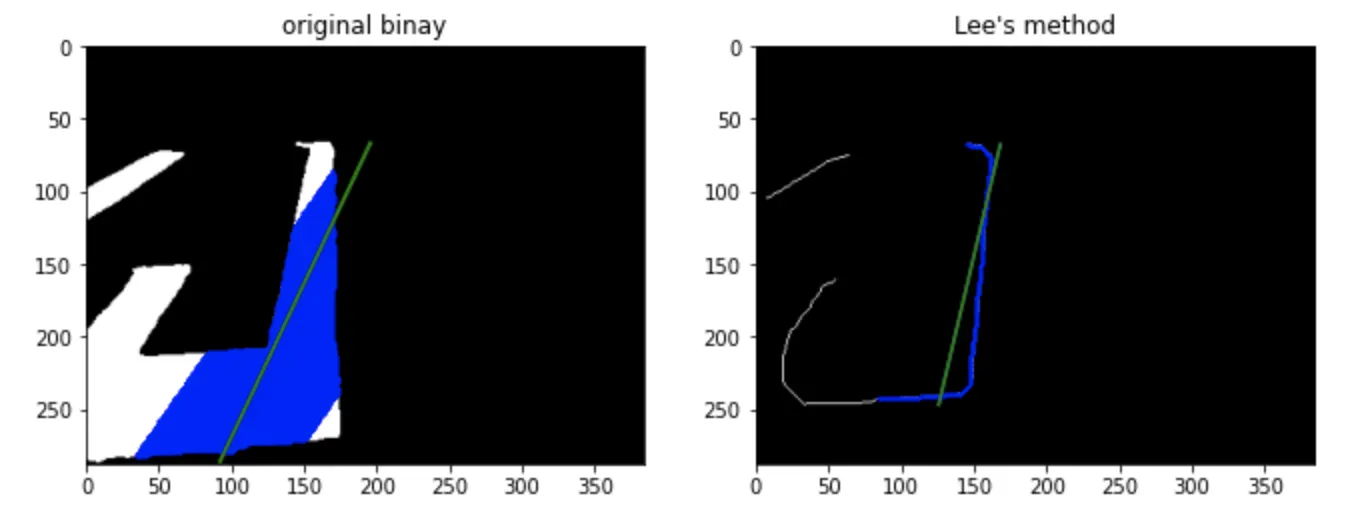

위 경우들과 같이, RANSAC 을 적용할 때, 그냥 RANSAC 을 적용하면 '충분한 샘플' 이 포함되기만 한다면 '적절한 직선' 을 선택했다고 여길 수 있기 때문에, 골격화 처리를 하게 되면 영상에서 원근법에 의해 나타나는 특성을 제거하고 점자블럭의 위상기하적 특징만을 (참고1) 최대한 남길 수 있다.
참고