행렬 는 (3,4) 행렬이고, 네 번째 열은 을 나타내는 벡터이다. 따라서, (3,3) 행렬 로부터 와 을 분해해 내는 문제로 수렴한다.
이를 위해 QR 분해( ‣ QR decomposition)를 사용한다. QR 분해는 어떤 행렬을 직교행렬과 상삼각 행렬로 분해해 주는 테크닉이다. 카메라 내부 행렬은 상삼각 행렬의 형태를 띠고, 원 혹은 구로부터 유도된 회전 행렬은 직교행렬(‣ Orthogonal matrix (orthonormal set))의 성질을 지닌다.
‣ QR decomposition)를 사용한다. QR 분해는 어떤 행렬을 직교행렬과 상삼각 행렬로 분해해 주는 테크닉이다. 카메라 내부 행렬은 상삼각 행렬의 형태를 띠고, 원 혹은 구로부터 유도된 회전 행렬은 직교행렬(‣ Orthogonal matrix (orthonormal set))의 성질을 지닌다.
‣ QR decomposition)를 사용한다. QR 분해는 어떤 행렬을 직교행렬과 상삼각 행렬로 분해해 주는 테크닉이다. 카메라 내부 행렬은 상삼각 행렬의 형태를 띠고, 원 혹은 구로부터 유도된 회전 행렬은 직교행렬(‣ Orthogonal matrix (orthonormal set))의 성질을 지닌다.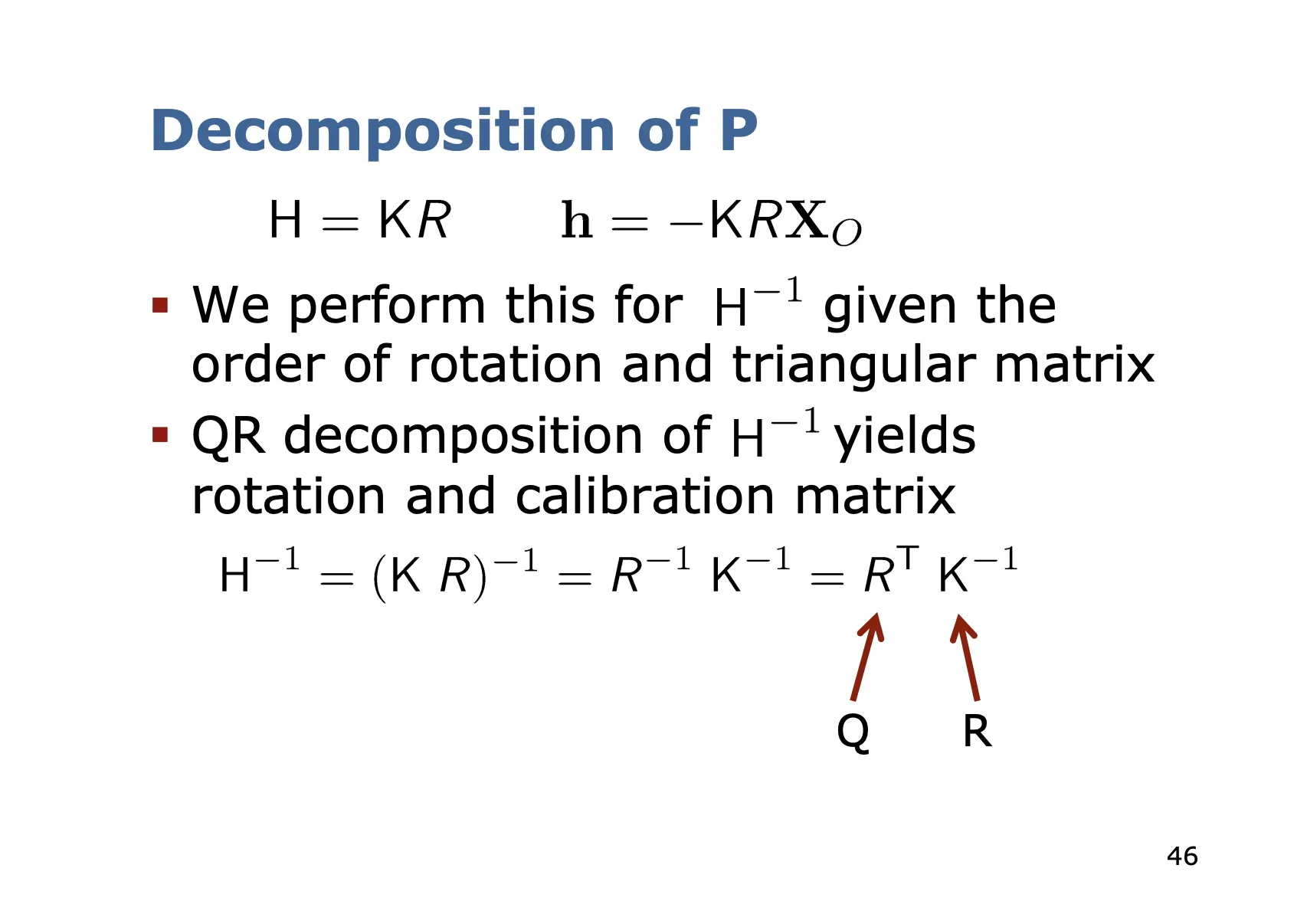
QR 분해의 결과물은 Q(직교) R(상삼각) 이지, R(상삼각) Q(직교) 가 아니다. 하지만 행렬은 연산의 순서가 중요하다(from1). 순서를 맞추어 주어야 한다. 회전 행렬의 전치행렬은 여전히 직교행렬이고(의문), 카메라 내부 행렬의 역행렬은 여전히 상삼각행렬이다(의문). 따라서 을 QR 분해함으로써 회전변환 행렬의 전치행렬과 카메라 내부행렬의 역행렬을 우선 얻어내는 방식으로 회전변환 행렬과 카메라 내부 행렬을 얻어낸다.
parse me : 언젠가 이 글에 쓰이면 좋을 것 같은 재료들.
1.
None
from : 과거의 어떤 생각이 이 생각을 만들었는가?
supplementary : 어떤 새로운 생각이 이 문서에 작성된 생각을 뒷받침하는가?
1.
None
opposite : 어떤 새로운 생각이 이 문서에 작성된 생각과 대조되는가?
1.
None
to : 이 문서에 작성된 생각이 어떤 생각으로 발전되고 이어지는가?
1.
참고 : 레퍼런스