
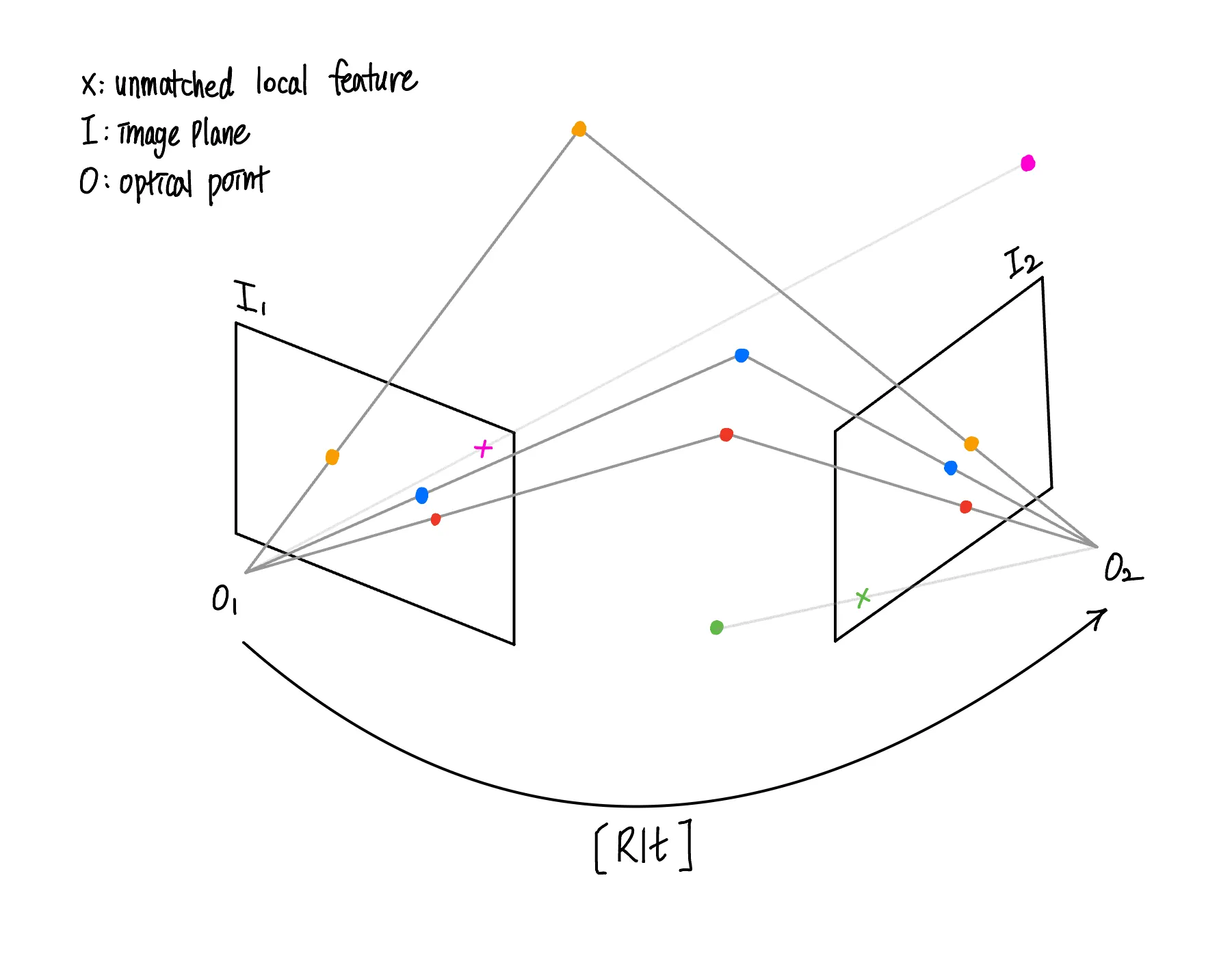
가장 기본적인 SLAM 에서 맵을 만들기 시작하는 순간(Map Initialization)을 이해해야 한다. 두 개의 영상에서 발견한 특징점들을 매칭한 결과들 중, 최소 갯수 이상의 매칭점들을 이용해 두 개의 영상의 기하적 관계를 찾아낸다. 찾아낸 기하적 관계에 삼각측량(Triangulation)을 이용하면 초기 맵을 만들 수 있다.
parse me : 언젠가 이 글에 쓰이면 좋을 것 같은 재료을 보관해 두는 영역입니다.
1.
None
from : 과거의 어떤 원자적 생각이 이 생각을 만들었는지 연결하고 설명합니다.
1.
•
앞의 글에서는 이미지 매칭이 무엇인지, 이 글에서는 SLAM과 이미지 매칭의 관계를 설명한다.
2.
•
앞의 글에서는 어떻게 두 개의 영상의 기하학적 관계를 수학적으로 표현하는지에 대해 설명되어 있다.
3.
•
아웃라이어의 존재를 인정하고 좋은 매칭점들을 찾아내기 위해 RANSAC을 사용할 수 있다.
supplementary : 어떤 새로운 생각이 이 문서에 작성된 생각을 뒷받침하는지 연결합니다.
1.
None
opposite : 어떤 새로운 생각이 이 문서에 작성된 생각과 대조되는지 연결합니다.
1.
None
to : 이 문서에 작성된 생각이 어떤 생각으로 발전되거나 이어지는지를 작성하는 영역입니다.
1.
ref : 생각에 참고한 자료입니다.
1.
None