
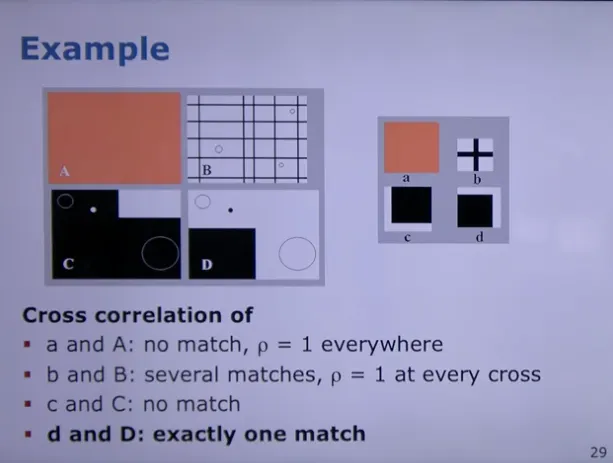
그림(ref5): 전체 영상과 부분 영상(페치, 템플릿)이 있을 때 부분 영상은 전체 영상의 어느 부분에 속하는가?
서울에서 남산타워와 롯데타워라는 랜드마크를 보고 내가 서울 어디에 있든지 상관없이 나의 위치를 가늠해볼 수 있다. 사진측량에서 지역 특징(local feature)이라고 불리는 녀석들도 랜드마크와 역할이 비슷하다. 지역 특징은 영상에서 특정 위치를 대표하는 성질을 가지고 있는 존재이자, 같은 피사체를 다른 각도와 다른 방향에서 촬영한 어떤 영상에서 공통적으로 발견되어 기준점이 될 수 있다.
지역 특징은 점이 될 수도 있고, 선이 될 수도 있고, 면이 될 수도 있다. 그 무엇이든 지역 특징이 될 수 있다. 특징 추출 알고리즘은 영상에서 지역 특징을 추출하는 알고리즘이다. 만약 특징 알고리즘이 점 특징을 추출한다면, 특징 추출 알고리즘을 통해 영상에서 지역 특징의 픽셀 위치인 특징점(키포인트, 관심점이라고도 불림)을 얻을 수 있다(ref6:local feature과 keypoint는 다르다). 설명 알고리즘은 추출된 특징에 대한 설명을 만들어내는 방식을 정의한다. 이미지 매칭은 영상마다 특징점 추출 알고리즘을 수행해 찾아낸 특징점과 이에 대한 설명(ref4:특징 벡터라고도 불림)을 비교하며 동일한 지점을 찾아내는 일이다.
parse me : 언젠가 이 글에 쓰이면 좋을 것 같은 재료을 보관해 두는 영역입니다.
from : 과거의 어떤 원자적 생각이 이 생각을 만들었는지 연결하고 설명합니다.
1.
•
사진측량 스터디를 할 때 공부하던 내용이다.
2.
•
과거 프로젝트에서 점자블록을 사용했던 것은 이미지 매칭 문제를 풀지 않기 위함이었다.
supplementary : 어떤 새로운 생각이 이 문서에 작성된 생각을 뒷받침하는지 연결합니다.
1.
None
opposite : 어떤 새로운 생각이 이 문서에 작성된 생각과 대조되는지 연결합니다.
to : 이 문서에 작성된 생각이 어떤 생각으로 발전되거나 이어지는지를 작성하는 영역입니다.
3.
4.
5.
6.
ref : 생각에 참고한 자료입니다.
4.
6.