
앞서 나는 자율주행을 위해 주행가능한 영역을 식별하기 위한 segmentation 모델을 학습시켰다. 하지만 추론 결과는 일부 상황에서 완벽하지 못했다. 특히 인도와 인도 사이에 애매한 차도가 놓여 있어, 인도에서 짧은 차도를 가로질러 다시 인도로 올라가야 하는 상황에서 주행 불가 영역(차도)으로 인식하는 문제나, 인도 위에 올라온 주차공간이 많은 성수동 특성상 인도인지 차도인지 올바르게 추론하지 못하는 경우가 많았다. Segmentation 결과에 의존하여 자율주행하기 어렵다는 결론을 얻었다.
사실 사람이라면, 이 횡단보도도 없는 좁은 차도나 인도와 차도의 애매한 경계는 그냥 주위를 한번 살피고 가로질러 갈 것이다. 하지만 AI입장에서는 이것이 차도인지 인도인지 애매하다. Segmentation의 출력은 단일 프레임에 대해 픽셀이 인도인지, 차도인지를 판단할 뿐이다. Segmentation 결과를 번복할 수 있는 정보 즉, 현재 모빌리티가 길찾기 API가 안내하는 경로상의 ‘주행 가능한 길 위에 있다’는 정보를 주입할 필요가 있다. 나는 이를 이미지와 절대적인 정보를 연결시켜줄 데이터가 다시 필요한 문제라고 본다.
처음에는 국도교통부 지도같이 절대적인 정보를 결합하려고 했으나 이 방법은 우리에게 적합하지 않다는 사실을 알게 되었다. 국도교통부 데이터를 이용해 성수동의 A라는 건물과 위치정보를 알게 된다고 해 보자. 일반적으로 건물과 같은 랜드마크를 이용해 위치추정 문제를 푸는 딥러닝 모델들은 (건물 A의 위치 정보, 건물 A가 촬영된 위치와 각도, 건물 A의 로드뷰 이미지) 튜플과 현재 취득한 이미지를 비교하며 내 위치를 복원한다. 하지만 우리가 (건물 A의 위치 정보, 건물 A가 촬영된 위치와 각도, 건물 A의 로드뷰 이미지) 튜플 중 네이버 등 로드뷰 제공 서비스로부터 건물 A의 로드뷰 이미지를 안정적으로 얻을 수 있는지, 건물 A가 촬영된 위치와 각도 정보를 얻을 수 있을지 불확실하다는 문제가 있다. A건물을 촬영한 로드뷰 이미지와 킥보드에 부착된 카메라의 도메인 차이를 보정하기 어렵다는 문제가 있다. 자율주행 킥보드에 부착된 카메라들은 가까운 거리의 장애물을 잘 회피하기 위해 약간 고개를 숙이고 바닥을 향하고 있으며, 로드뷰와 달리 파노라마 카메라를 사용하지 않는다. 심지어 성수동 환경은 재개발이 빠르게 진행되는 환경이다. 우리의 엔지니어링 리소스상 로드뷰 데이터에 의존하지 않기는 어려운데, 로드뷰는 같은 공간을 짧은 시일 안에 재촬영하지 않는다.
항상 정지해 있고 감지하기도 쉬운, 신호등과 같은 물체를 기준으로 절대적인 정보와 연결되는 아이디어를 떠올려볼 수도 있다. 하지만 이것에도 문제가 있다. 성수동 골목길에는 신호등이 없다. 인도에도 신호등은 없다. 신호등의 절대위치를 엄밀하게 기록해 둔 공공데이터를 찾기 어려웠다. 대부분의 물체들이 가림 현상이 생기기도 쉬웠다. 가림 현상이 발생하지 않는 물체를 떠올려 보더라도, 이를 찾아낼 수 있도록 모델을 학습시킬 수 있는 이미지 데이터셋을 찾기 어려웠다. 이 또한 도메인 차이 문제를 내포한다.
조금 더 좋은 GNSS 단말을 사용하려고도 해 보았다. 하지만 단말 자체의 가격이 무지막지 비쌌고, 기상상황이나 사용자 수에 따라 안정성이 달라졌으며, USB C 포트와의 간섭도 매우 심했다. 현재 모빌리티가 길찾기 API가 안내하는 경로상의 ‘주행 가능한 길 위에 있다’는 정보를 찾는 작업은 정체되었다.
관심사는 다시 인도로 돌아왔다. 차도에 중앙선을 긋고 흰색 점선을 그어 차선을 만들듯, 도로를 만드는 규칙이 있다면, 인도를 만드는 규칙 또한 존재할 것이다. 우리는 시각장애인을 위한 점자블록의 엄격한 관리기준 때문에, 그 위에 킥보드를 두지 않기 위해 노력하고 있다. 그런데 어쩌면 점자블록의 염격한 기준을 활용가능한 대상으로 바라볼 수도 있겠다는 생각이 머리를 스쳤다. 굉장히 재미있었다. 우리는 킥보드를 점자블럭에서 치우고 있었단 말이다. 하지만 이제 점자블럭에 올려야 할지도 모르겠다.
점자블럭은 정기적으로 유지보수되며, 파손될 걱정이 없다. 전동킥보드나 장애물뿐 아니라 눈(snow)과 같은 기상 상황에 영향을 받을 일도 적다. 왜냐하면 다음과 같은 규정이 있기 때문이다.
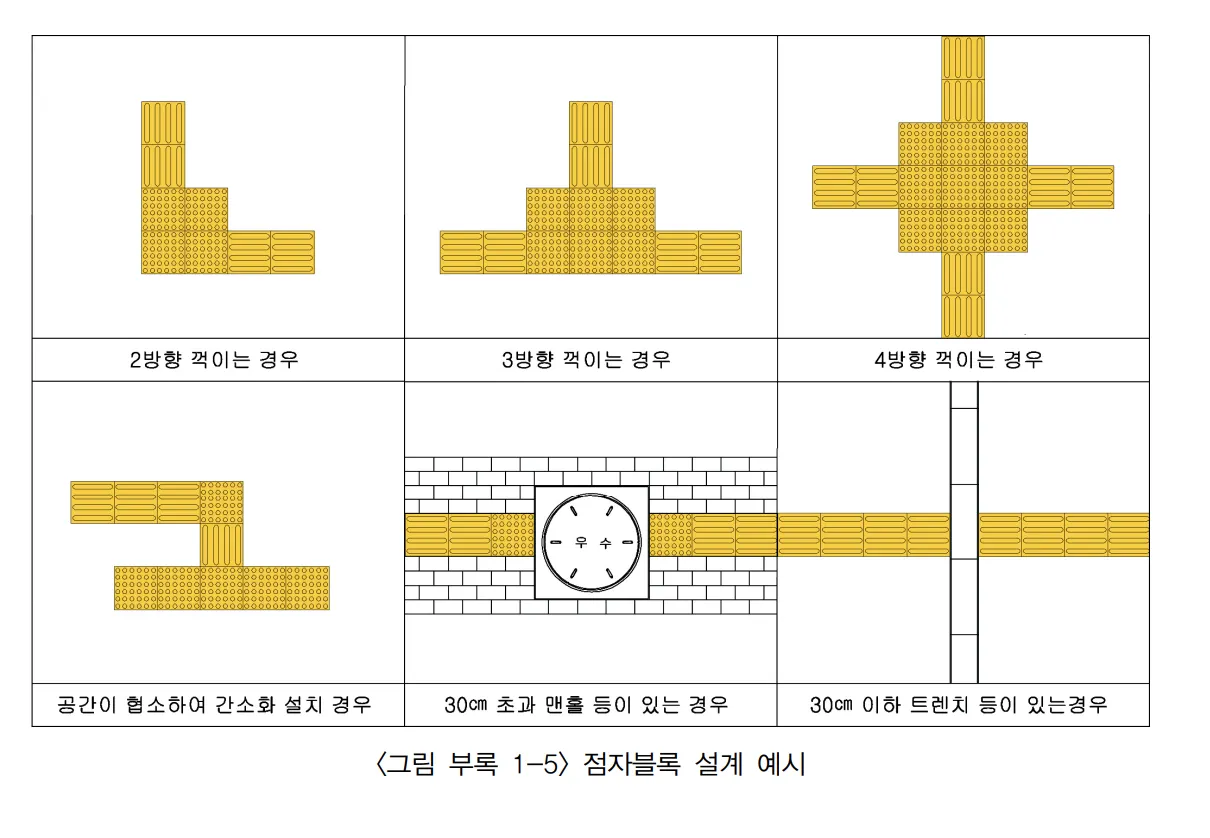
점자블록은 인도의 생김새를 가장 정확히 담고 있다. 카메라가 약간 아래를 바라보고 있기 때문에, 도로나 인도의 모양을 파악하기 쉽지 않았다. 하지민 점자블럭이 ‘4방향 꺾임’이라고 표시하는 것만 성공적으로 인식할 수 있다면 킥보드의 카메라에 사거리가 모두 잡힐 필요도, 사거리의 경계를 정확히 검출할 필요도 없는 것이다.
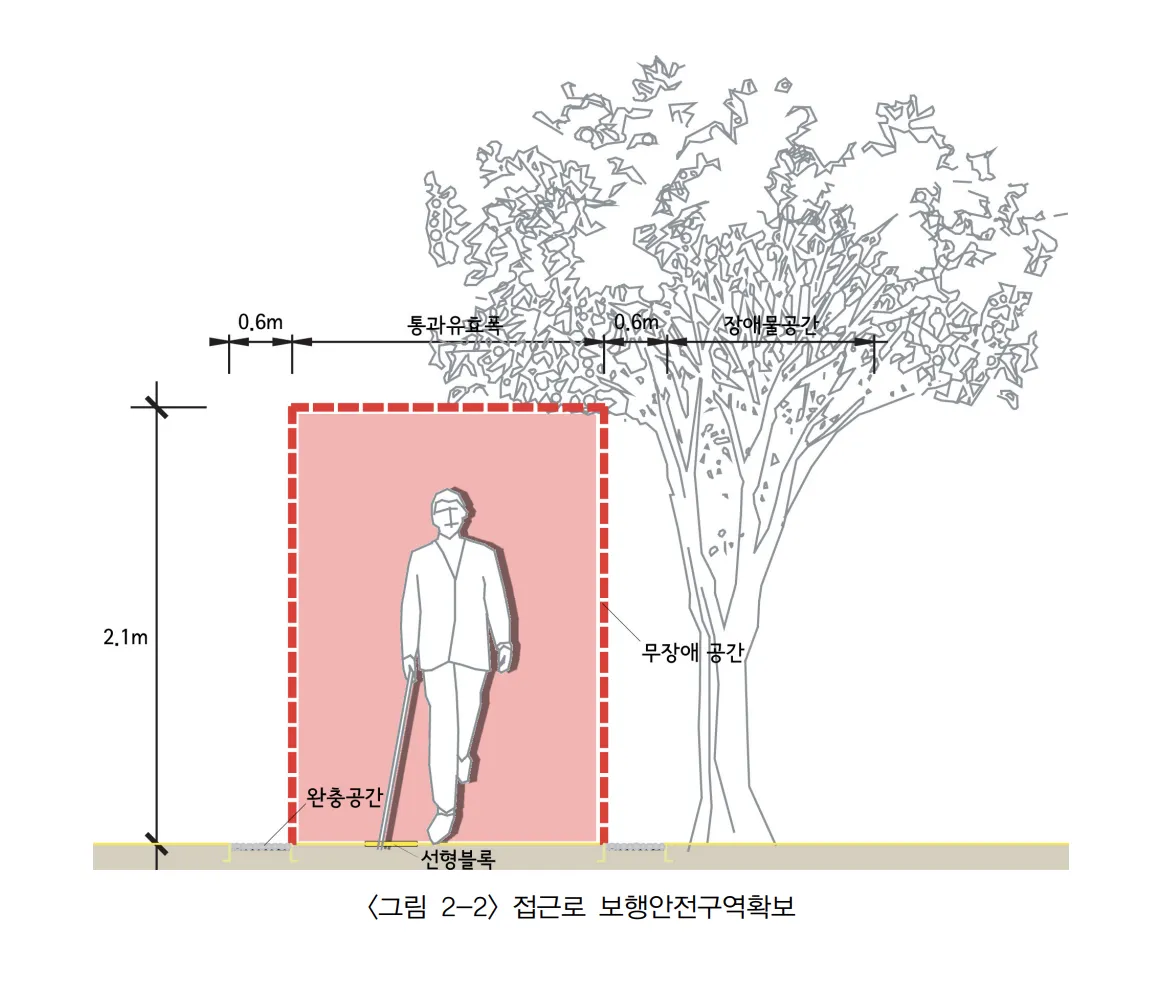
그림(ref5): 점자블럭을 중심으로 근처에 장애물이 존재하지 않을 것을 법적으로 보장한다.
시각장애인을 위해 조금이라도 더 명확하게 정보를 전달하기 위해 인도의 색상과 명확히 구분되는 색을 사용하는 덕에, segmentation 모델도 점자블록을 쉽게 인지했다.
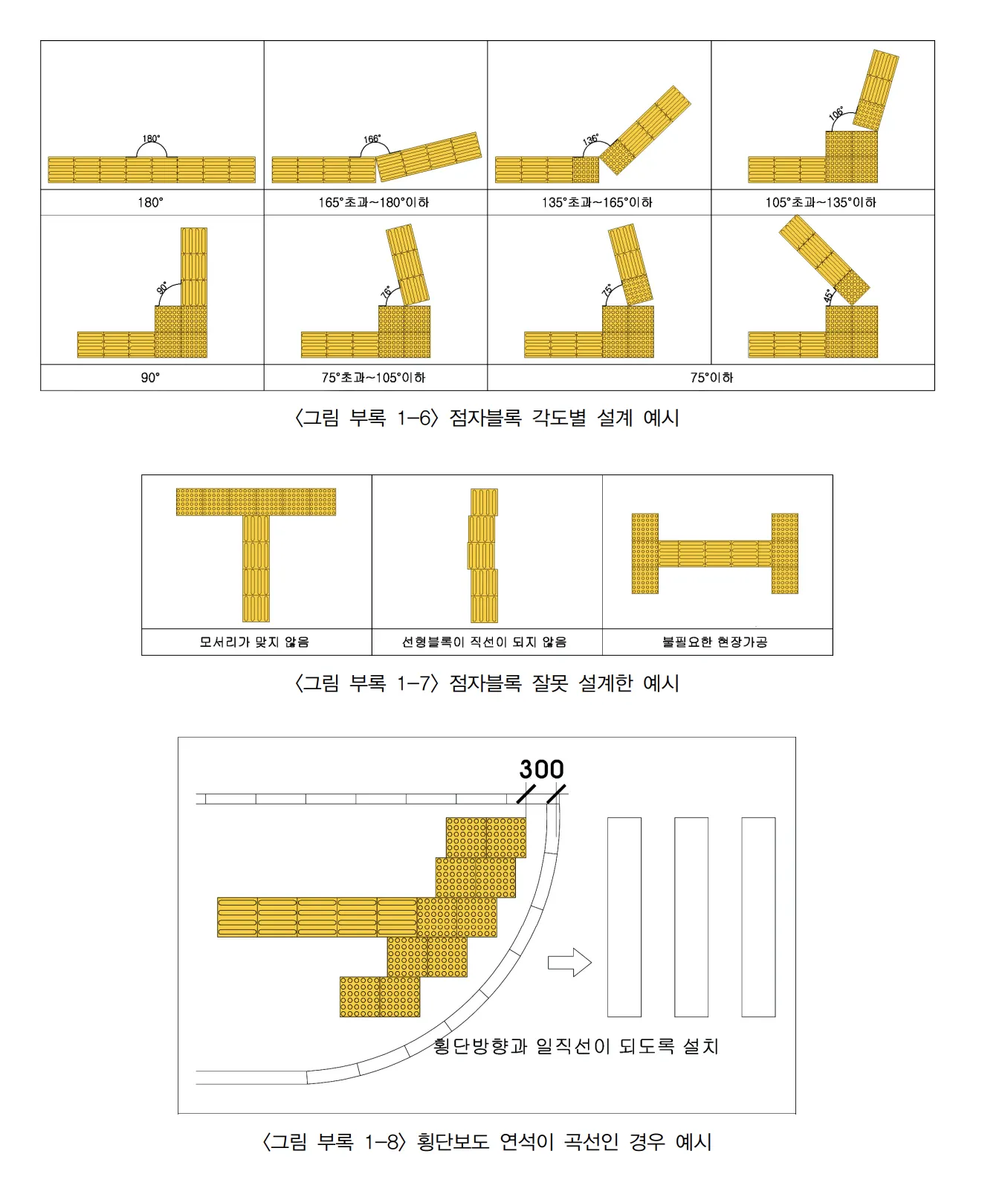
점자블록은 횡단의 방향을 명확히 표시한다는 것도 엄청난 강점이다. 중간에 잠시 차도로 진입하더라도, 반대편 점자블록을 북극성 삼아 조향할 수 있어 segmentation 모델이 프레임 간 맥락을 놓쳐 발생하는 문제, 이미지와 절대적인 정보를 연결시켜줄 데이터가 다시 필요한 문제를 한번에 우회할 수 있었다.
마치 창고 천장에 붙은 QR코드를 이용핰 자율주행처럼, 바닥에 붙은 QR코드였다. 점자블록 자체가 스스로 강력한 제약 조건을 걸고 있지 않은가!
parse me : 언젠가 이 글에 쓰이면 좋을 것 같은 재료을 보관해 두는 영역입니다.
1.
None
from : 과거의 어떤 원자적 생각이 이 생각을 만들었는지 연결하고 설명합니다.
1.
•
주행 영역을 식별하기 위한 segmentation 추론 결과는 완벽하지 못하다. 이를 극복할 수 있는 방법들 중 하나가 휴리스틱을 사용하거나 영상으로 얻을 수 있는 정보 이외의 명확한 기준을 가진 정보(예를 들어, GNSS나 국도교통부 지도등)를 사용하는 것이라고 생각했다. 점자블록을 사용하는 것도 이 맥락의 일부라고 볼 수 있다.
2.
•
앞의 글에 작성된 것을 시스템에 잘 적용하는 것은 사실상 불가능에 가까웠다. 그래서 의미적 손실이 거의 일어나지 않을 가능성이 높은 ‘점자블럭’이라는 것을 활용해 보자는 아이디어를 제시했다.
3.
•
어차피 모든 길을 다닐 수 없다면 점자블럭이 설치된 길만 잘 다닐 수 있도록 만드는 것은 어떨까? 그래도 충분히 효용을 만들 수 있다.
supplementary : 어떤 새로운 생각이 이 문서에 작성된 생각을 뒷받침하는지 연결합니다.
opposite : 어떤 새로운 생각이 이 문서에 작성된 생각과 대조되는지 연결합니다.
1.
None
to : 이 문서에 작성된 생각이 어떤 생각으로 발전되거나 이어지는지를 작성하는 영역입니다.
1.
ref : 생각에 참고한 자료입니다.