
디어 자율주행 킥보드의 ODD (참고3) 는 "모든 골목을 잘 다닐 수 있도록 만들겠다." 가 되어선 안 된다. 디어의 데이터로 어림해 계산해 보았을 때, 백번 양보해서 완전자율주행이 완성된다고 치고 디어의 모든 킥보드에 이것을 배포한다고 하더라도 그 경제적 효용은 별로 크지 않다는 것을 알 수 있다 (참고1, 12). 게다가 모든 것을 다 잘하고 모든 상황에 다 대응할 줄 아는 킥보드를 만든다는 것 자체가 린하지 않다.
테슬라도 거대한 스케일의 문제를 풀기 전에, 처음에 '스마트서먼' 이라는 이름의 공간적 (반경 500m 정도에서 차주를 찾아갈 수 있도록 돕는 시스템) ODD 를 잡고 개발했고 (참고4), 카카오모빌리티도 '주요 지역' 과 '혼잡하지 않은 시간대' 등의 시공간적 ODD 를 잡고 개발한 뒤 확장해 나갈 것이라고 - 기술 수준과 ODD 의 연관성을 컨퍼런스 내내 강조했다 (참고5, 6). 배달의민족은 먼 거리가 아니라, 아파트 입구~아파트 단지 집 앞과 같은 '라스트마일' 을 공간적 ODD 로 잡았다 (참고7). 현대자동차의 사내스타트업 MOBINN 은 '작은 실내공간 또는 턱이 있는 아파트 입구' 와 같이 장애물로부터 robust 한 공간적 제약조건을 ODD 로 잡고 개발 중이다 (참고8).
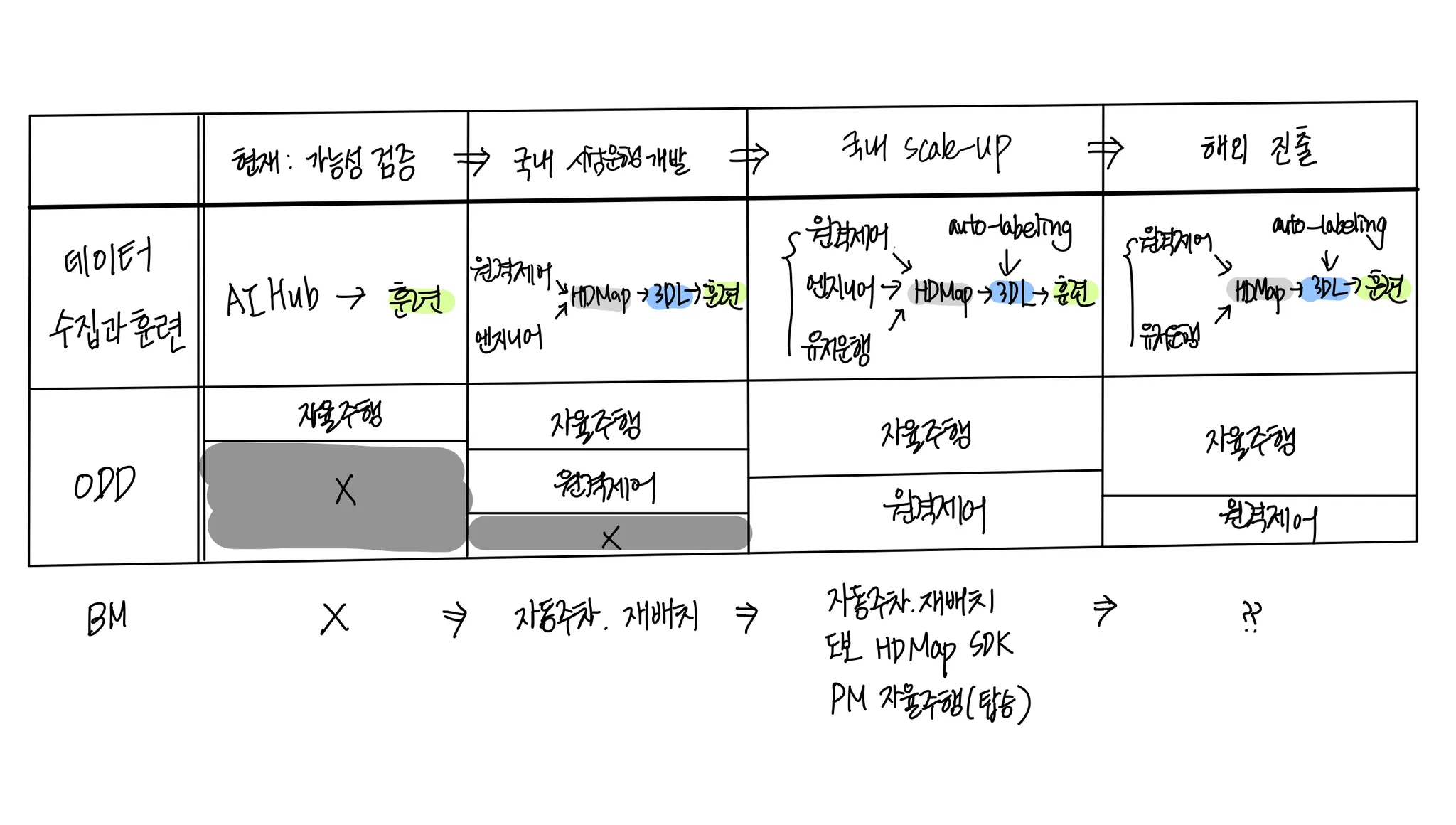
디어 자율주행킥보드는 "크고 잘 닦여 있는 길" 을 알고 있고, 그러한 길을 잘 다닐 수 있도록 만드는 방향으로 설계해야 한다 (참고13: 크고 잘 닦인 길을 찾아주는 서비스). 실제로 웨이모 는 잘 되지 않는 환경에서 사람이 개입하는 fleet response 라는 기능을 탑재해 둔 것과 같은 맥락이다 (참고9). 테슬라의 자율주행도, 자율주행이 불가능한 환경에서는 사람이 유연하게 넘겨받을 수 있도록 신경쓰고 있다.
이와 같이 모든 것을 다 하겠다는 것이 아니라 원격제어 (참고11:배달의민족 텔레오퍼레이션) 등을 통해 반드시 사람이 보조할 각오로 태스크를 정의해야 한다. 이것은 segway 가 추구하는 방향과 일치한다. 큰 길에 최적화시켜 두었을 경우, 사람이 해야 하는 일은 큰 길까지 원격 조종을 하는 일로 줄어든다. 그때부터는 킥보드가 알아서 찾아갈 수 있기 때문이다.
원격제어가 된다면, 사람이 직접 가지 않고도 데이터를 수집하거나 HD Map 을 구축(참고10) 할 수 있어 배포를 먼저 하고 나서 그에 맞는 방식을 찾아 나가는 등의 행동을 할 수 있다.
@12/29/2021, 7:10:00 PM
supplementary
참고
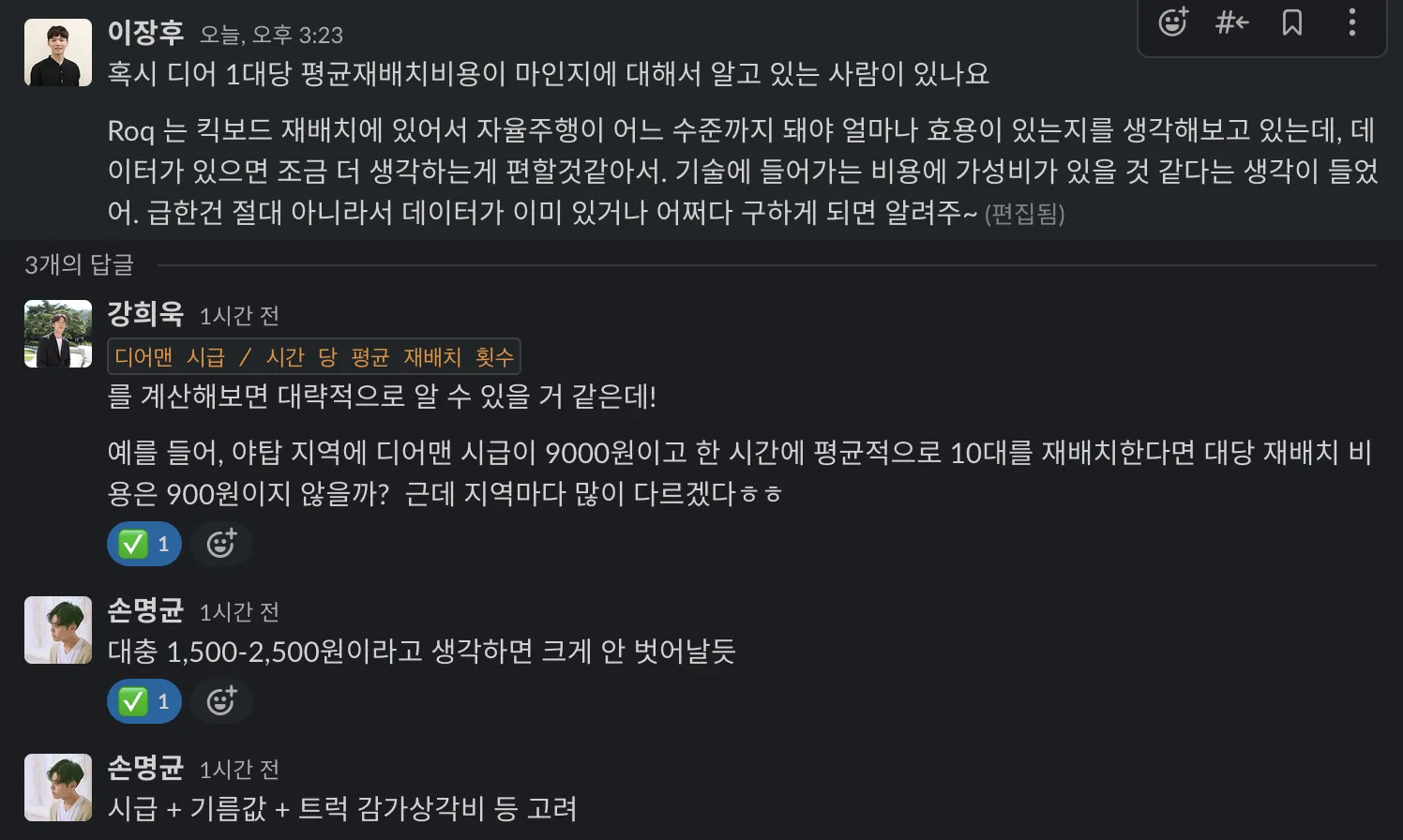
1.
대당 1500원
2.
자율주행 킥보드를 개발함으로써 얻는 PR 효과를 모두 떼고, 자율주행 킥보드가 주는 운영 측면의 효용만을 생각해 보자. 자율주행 킥보드가 재배치 문제를 완벽하게 해결한다고 생각해 보자. 우선 어려운 가정 두 개가 들어갔다. (1) 자율주행 킥보드가 만들어짐. (2) 재배치 문제를 무인으로 완벽히 해결함. 만약 1일에 200대 재배치가 이루어지고, 디어 전체 킥보드가 수혜를 본다면 년 1억원의 수혜를 볼 수 있다. 1일에 1000 대 재배치가 이루어진다고 하더라도 1억정도의 수혜밖에 나오지 않는다. 하지만 이것은 (1) 에 필요한 기간과 폼팩터 교체에 들어가는 비용, (2) 를 개발하기 위한 비용을 고려했을 때 너무 너무 작은 수치이다. 중간다리가 필요하고, 자율주행 기술은 부분적으로 지원해야 한다. 이것은 세그웨이의 T60, T60 lite 모델에 대한 생각. 세그웨이는 어떻게 전동킥보드 자율주행을 만들어가고 있는가?‣ 의 접근과 비슷하다.
a.
6.
8.