0이 아닌 가 곱해진 모든 에 대해서 또는 과 동일한 점(point)이라고 보는 것이 동차좌표계(homogeneous coordinate)이다.

당연히 여기에서 등호가 있다고 연산할 때 마음대로 치환해도 된다는 것은 아니다. 는 동차좌표계에서 정의된 점이고, 는 유클리드 좌표계에서 정의된 점이기 때문이다.
(2d 에서는 모든 z' 에 대해 공평해!)
이렇게 표현하는 이유는, 모든 z' 에 대해 (참고3), 또는 카메라 원점 좌표계 기준 3D 공간상의 점의 모든 Z 방향 값 (참고1 의 notation) 에 대해서 상관없는 점임을 표현할 수 있기 때문이다.
이를 생각해 두고, 핀홀 카메라 모델의 투영식 (참고2) 을 이해해 볼 수 있다.
그림 (참고2)
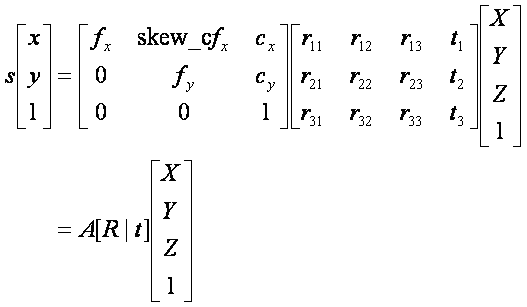
계수 s (참고1:k의 역할과 비슷함) 를 밖으로 빼준다고 생각해 보자. 남은 벡터 [x, y, 1] 은 x'/z' 와 y'/z' 를 표현한 것일 뿐이다.
동적좌표계를 사용했을 때 저절로 따라오는 장점은 2D 를 3D 상에서 올리면서 복잡해질 것 같음에도 오히려 기하적 특징들을 해석하기가 더 쉬워진다는 점이다 (참고1). 가령 정규이미지 평면은 카메라 좌표계와 거리가 1 만큼 (단위거리만큼) 떨어진 평면이다. 2D 카메라 원점 좌표계를 동차 좌표계로 표현하면 아주 쉽게 실제 '거리가 1 만큼 떨어진 점' 이라는 의미를 띠도록 만들 수 있다.
참고