‘좌표계의 기준이 [아래쪽, 오른쪽, 뒷쪽] 이다 혹은 이다.’ 라는 말은 무슨 말일까? 그렇다면 ‘COLMAP(참고2)에서 제시하는 좌표계(frame)는 이다' 같은 말은 도대체 무슨 뜻일까(참고1)? 둘이 다른 말이라면, 둘은 무슨 차이가 있을까?
Case 1
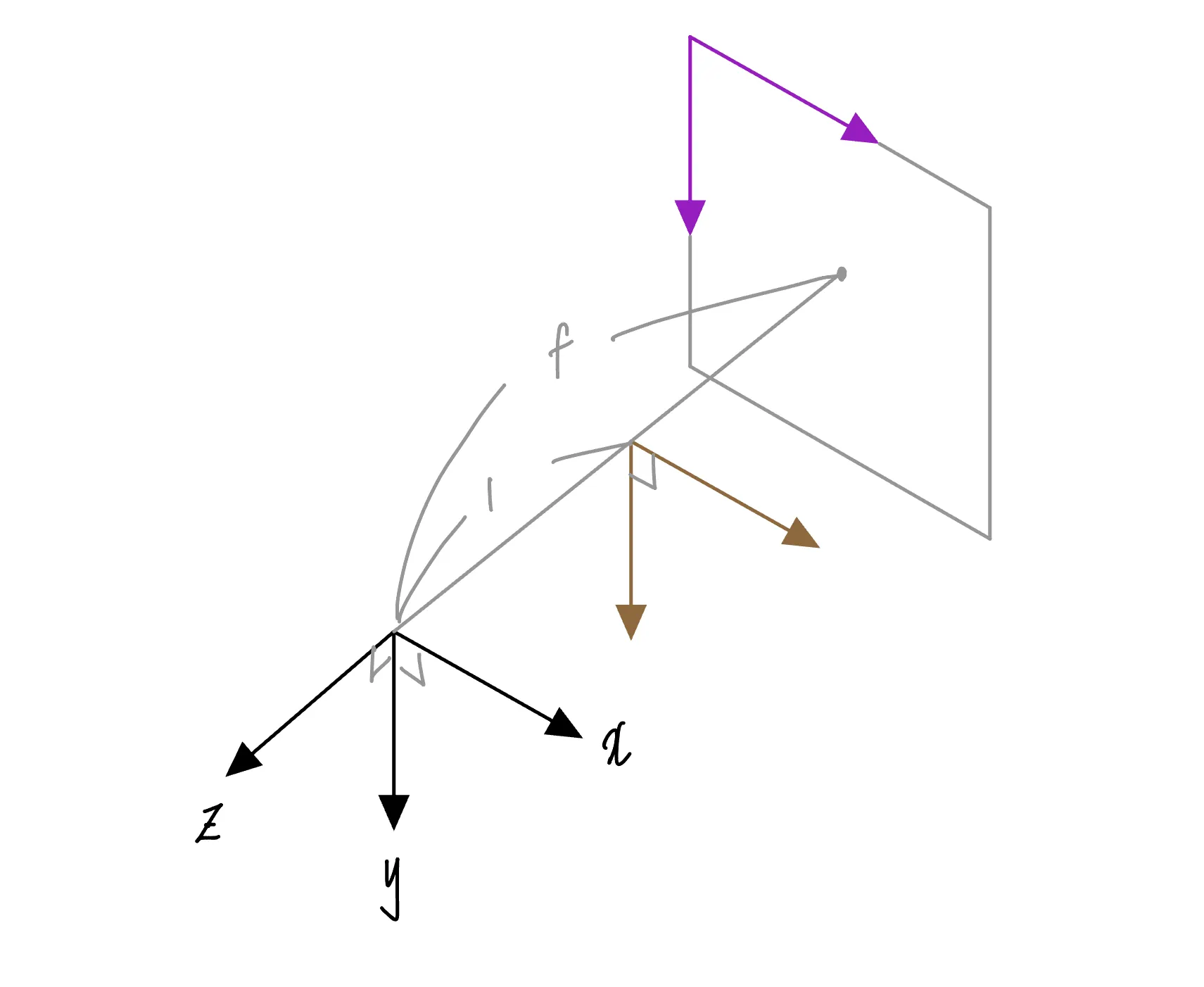
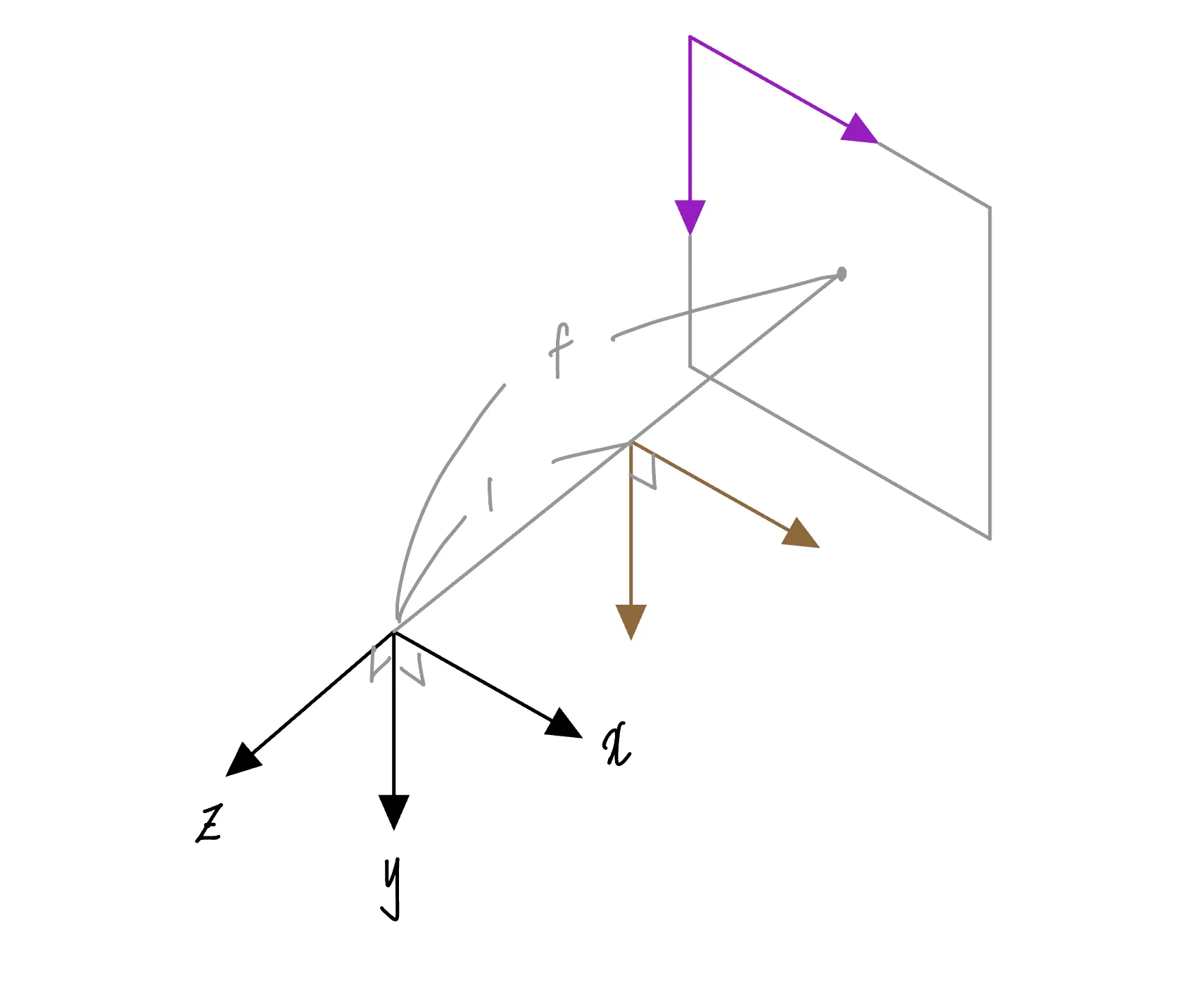
그림 (참고1)
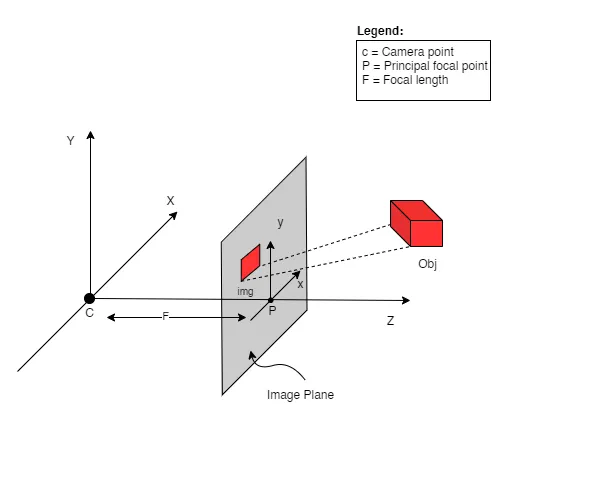
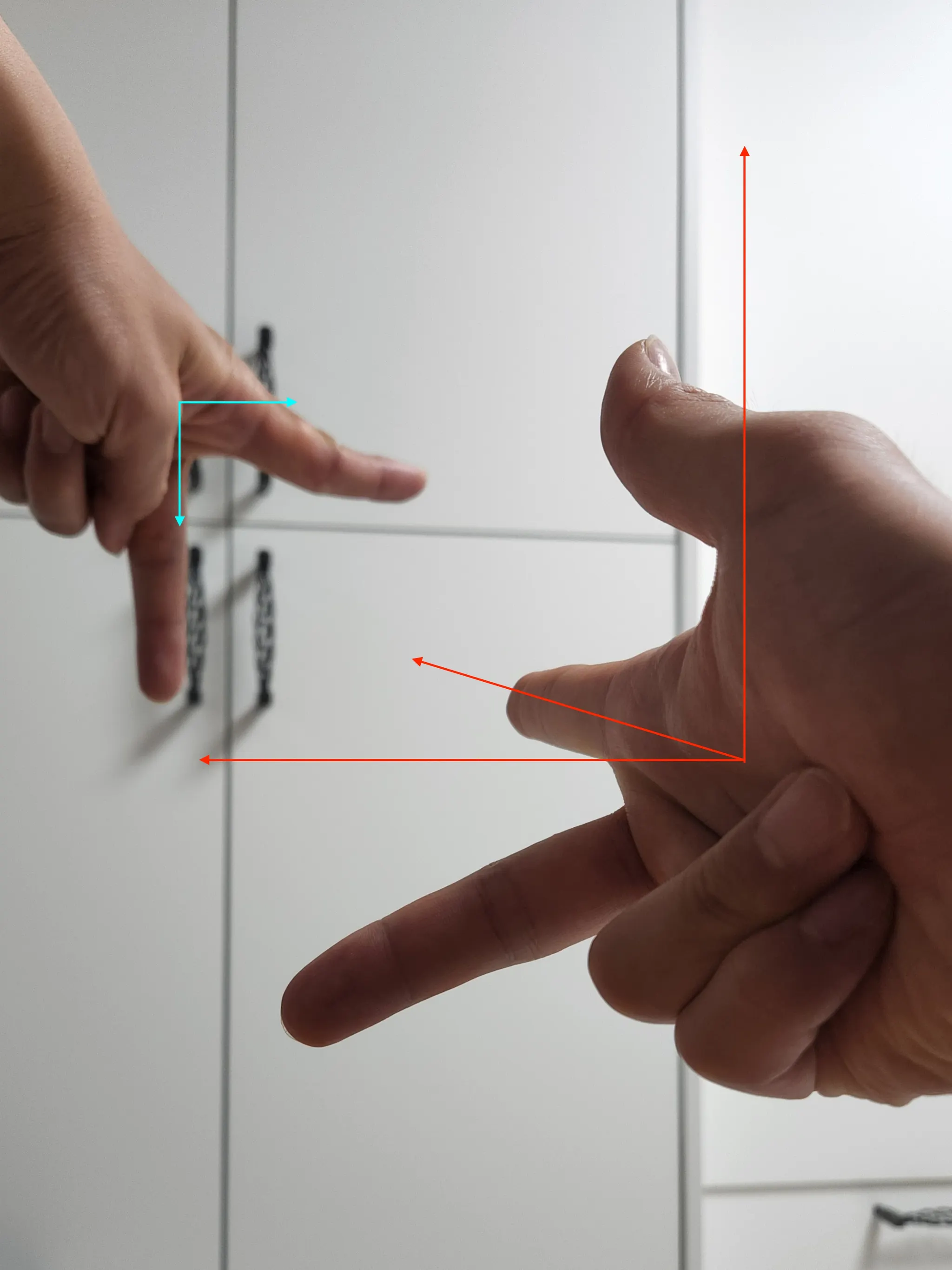
위 그림을 보자. 위 그림에는 카메라 원점 좌표계와 이미지 평면 그려져 있고, 카메라 정규 좌표계는 생략되어 있다. 이 그림에 따르면, 카메라가 바라보는 방향이 이다. 그러니까 ‘전방’ 이다. 오른손으로 위 그림의 좌표계를 표현해 보았다. 검지손가락을 나에게서 멀어지는 방향으로 두고 방향이라고 둔다면, 은 왼쪽 방향, 는 윗쪽 방향이라고 할 수 있겠다.

카메라 원점 좌표
카메라 원점 좌표 (빨강), 이미지 좌표 (연녹). 기저벡터의 길이 차이를 표현했다.
3D 공간상에 존재하는 점인데, 카메라 원점 좌표계의 언어로 해석한 좌표값 를(혹은 정규 이미지 좌표계의 언어로 해석한 좌표값 를(from4)), 이미지 평면 좌표계 의 언어 로 해석하고 싶다고 생각해 보자(from3). 둘 사이의 관계를 정의하는 변환 는 다음과 같이 표현 가능하다. 이때 좌표들이 동차좌표라는 뜻을 담기 위해 를 적어 주었다(from2).
카메라 내부 파라미터의 정의에 따라, 이다. 또한, 위 그림으로 보았을 때 (from5)이고, 이다. 동차좌표의 정의에 따라, 이므로, 이든 이든 여부에 상관없이 는 다음과 같이 모델링 가능하다. 의 부호는 당연히 모른다.
0 | ||
0 | ||
0 | 0 |
부호를 관찰해 보자. 가 양수이면, 다음과 같은 결과가 나온다.
- | - | |
- | - | |
+ |
가 음수이면, 다음과 같은 결과가 나온다.
+ | + | |
+ | + | |
- |
뭐 어쩌라고..? 조금만 더 가보자.
Case 2
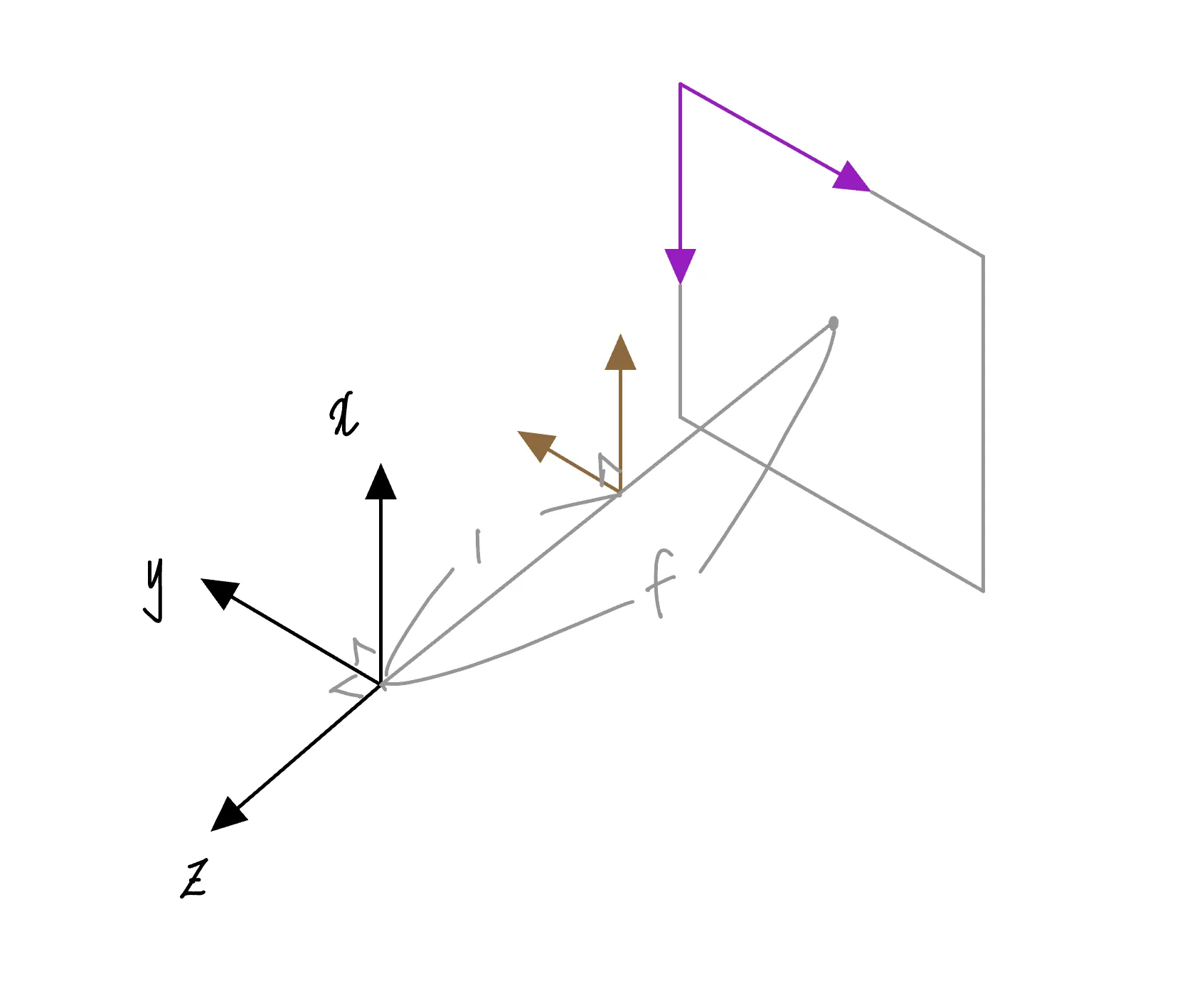
그림 (참고2)
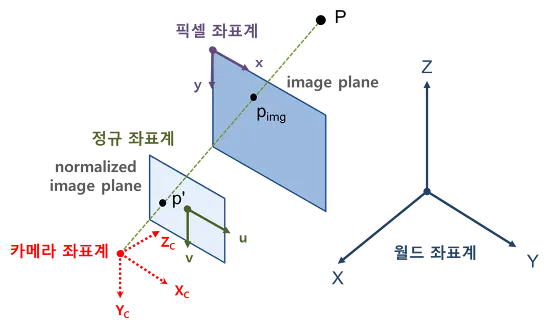
이번에는 조금 다르게 생긴 그림을 가져왔다. 그림을 보자. 위 그림에는 카메라 원점 좌표계, 이미지 좌표계가 그려져 있고, 카메라 정규 좌표계도 그려져 있다. 이 그림에 따르면, 카메라가 바라보는 방향이 이다. 그러니까 ‘전방’ 이다. 이번에는 왼손으로 위 그림의 좌표계를 표현해 보았다. 검지손가락을 나에게서 멀어지는 방향으로 두고 방향이라고 둔다면, 은 오른쪽 방향, 는 아랫쪽 방향이라고 할 수 있겠다.

카메라 원점 좌표
이 경우에도 카메라 내부 파라미터의 정의에 따라, 이다. 하지만, 이번 상황에선 이미지 좌표계의 좌표축 방향과 카메라 원점 좌표계의 방향이 동일하므로, 이고, 이미지 좌표계의 원점이 카메라 원점 좌표계 기준 음수 방향으로 평행이동했으므로 이다. 이후는 똑같은 논리로, 동차좌표의 정의에 따라, 이므로, 이든 이든 여부에 상관없이 는 다음과 같이 모델링 가능하다. 의 부호는 당연히 모른다.
0 | ||
0 | ||
0 | 0 |
부호를 보자. 가 양수이면, 다음과 같은 결과가 나온다.
+ | + | |
+ | + | |
+ |
가 음수이면, 다음과 같은 결과가 나온다.
- | - | |
- | - | |
- |
Case 3
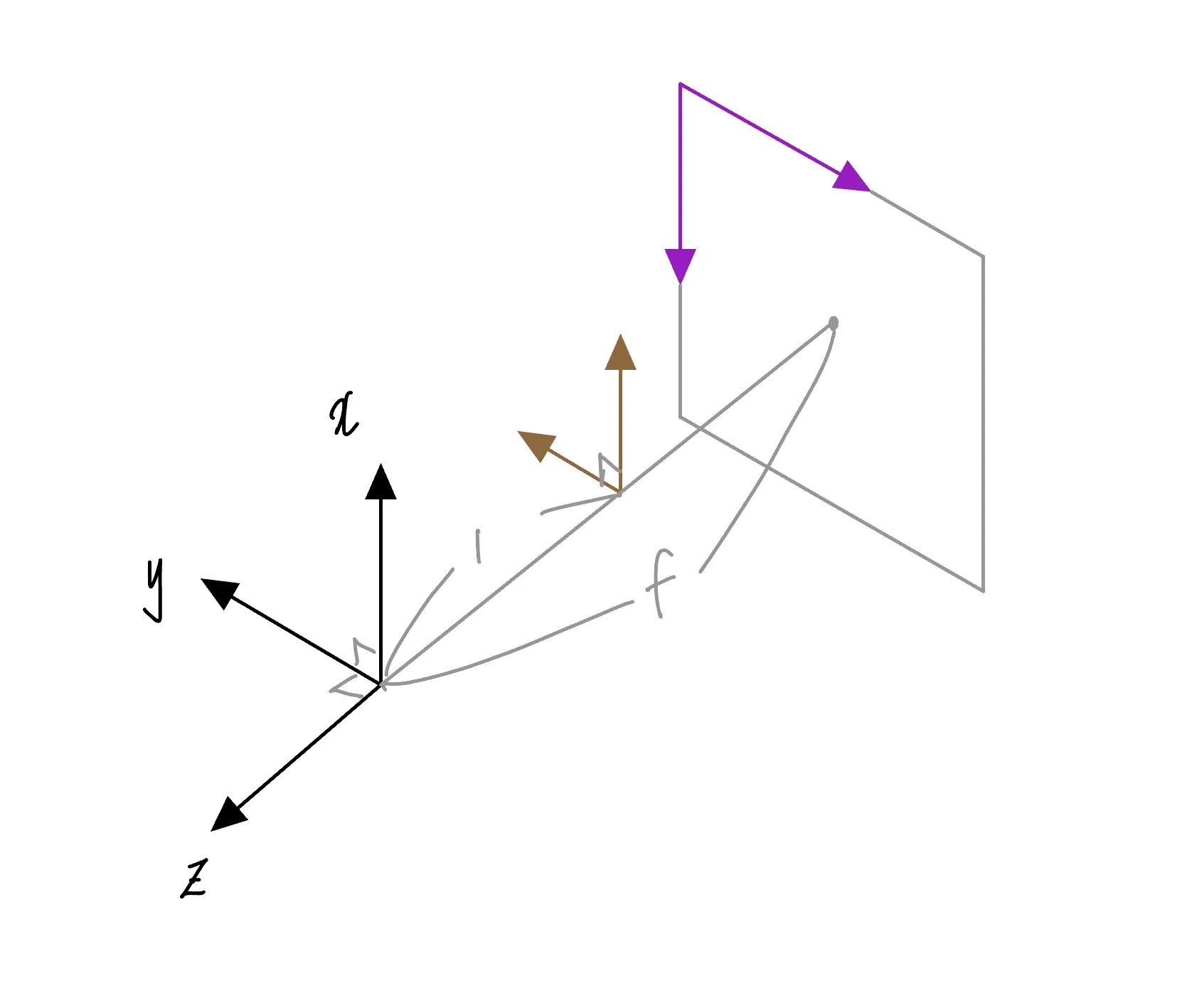
위 그림에는 카메라 원점 좌표계, 카메라 정규 좌표계, 이미지 좌표계가 그려져 있다. 이 그림에 따르면, 지금까지 보았던 경우들과 반대로 카메라가 바라보는 방향이 이다. 그러니까 ‘후방’ 이다.
카메라 내부 파라미터의 정의에 따라, 이다. 이번 상황에선 이미지 좌표계의 좌표축 방향과 카메라 원점 좌표계의 좌표축 방향이 반대이므로, 이고, 이미지 좌표계의 원점이 카메라 원점 좌표계 기준 양수 방향으로 평행이동했으므로 이다.
가 양수이면, 다음과 같은 결과가 나온다.
- | - | |
- | - | |
+ |
가 음수이면, 다음과 같은 결과가 나온다.
+ | + | |
+ | + | |
- |
Case 4
위 그림에는 카메라 원점 좌표계, 카메라 정규 좌표계, 이미지 좌표계가 그려져 있다. 마찬가지로, 카메라가 바라보는 방향이 이다. 그러니까 ‘후방’ 이다.
카메라 내부 파라미터의 정의에 따라, 이다. 이번 상황에선 이미지 좌표계의 좌표축 방향과 카메라 원점 좌표계의 좌표축 방향이 일치하므로, 이고, 이미지 좌표계의 원점이 카메라 원점 좌표계 기준 양수 방향으로 평행이동했으므로 이다.
가 양수이면, 다음과 같은 결과가 나온다.
+ | + | |
+ | + | |
+ |
가 음수이면, 다음과 같은 결과가 나온다.
- | - | |
- | - | |
- |
분명히 각각의 경우 카메라 내부행렬 K 의 구성원소들의 크기가 똑같더라도 부호는 다를수밖에 없다. 그런데 좌표계에 대한 명칭이나 기호, 좌표축 방향 등은 프레임워크에 따라, 사람에 따라 정의하기 나름이기 때문에 이에 따라서 조금씩 차이가 있을 수 있다(참고3). 카메라와 관련된 좌표계들의 방향이 서로 어떻게 관계하는지에 따라 카메라 내부 행렬 K 의 값이 내포하는 바가 달라지므로 이 부분을 인지하고 있어야 한다.
이제 마지막 사고 과정이다. 지금까지 사고과정의 핵심이 되었던 이 두 식에는 어떤 차이가 있을까?
두 식 중 특히 에 주목해 보자. 식 은 다음 식으로부터 쉽게 얻을 수 있다. 아래 식에서 은 “3D 월드 좌표계의 언어로 해석한 3D 월드 위의 점의 동차좌표 표현” 을 나타낸다.
은 3차원 데카르트 좌표( Cartesian Coordinates in Euclidean World (Conventional Coordinates))이다. “3D 월드상에 존재하는 어떤 지점의 좌표를 카메라 원점 좌표계의 언어로 해석한 표현”이다. 즉, 카메라의 렌즈가 바라보고 있는 방향이 라면, 이어야만 한다는 것이다. 하지만 렌즈가 바라보고 있는 방향이 라면 이어야만 한다. 즉, 이고 이다. 정리하면 다음과 같다.
Cartesian Coordinates in Euclidean World (Conventional Coordinates))이다. “3D 월드상에 존재하는 어떤 지점의 좌표를 카메라 원점 좌표계의 언어로 해석한 표현”이다. 즉, 카메라의 렌즈가 바라보고 있는 방향이 라면, 이어야만 한다는 것이다. 하지만 렌즈가 바라보고 있는 방향이 라면 이어야만 한다. 즉, 이고 이다. 정리하면 다음과 같다.
Cartesian Coordinates in Euclidean World (Conventional Coordinates))이다. “3D 월드상에 존재하는 어떤 지점의 좌표를 카메라 원점 좌표계의 언어로 해석한 표현”이다. 즉, 카메라의 렌즈가 바라보고 있는 방향이 라면, 이어야만 한다는 것이다. 하지만 렌즈가 바라보고 있는 방향이 라면 이어야만 한다. 즉, 이고 이다. 정리하면 다음과 같다.Case 1 의 K
- | - | |
- | - | |
+ |
Case 2 의 K
+ | + | |
+ | + | |
+ |
Case 3 의 K
+ | + | |
+ | + | |
- |
Case 4 의 K
- | - | |
- | - | |
- |
parse me : 언젠가 이 글에 쓰이면 좋을 것 같은 재료들.
1.
None
from : 과거의 어떤 생각이 이 생각을 만들었는가?
1.
2.
4.
supplementary : 어떤 새로운 생각이 이 문서에 작성된 생각을 뒷받침하는가?
1.
None
opposite : 어떤 새로운 생각이 이 문서에 작성된 생각과 대조되는가?
1.
None
to : 이 문서에 작성된 생각이 어떤 생각으로 발전되고 이어지는가?
1.
참고 : 레퍼런스