
테슬라는 N개의 2D 카메라만을 조합하여 자율주행을 하고자 하는 기업이므로, 테슬라가 구축하고자 하는 자율주행은 [2D(Cameras)→뉴럴넷→3D벡터공간→주행](ref5) 파이프라인으로 추상화할 수 있다.
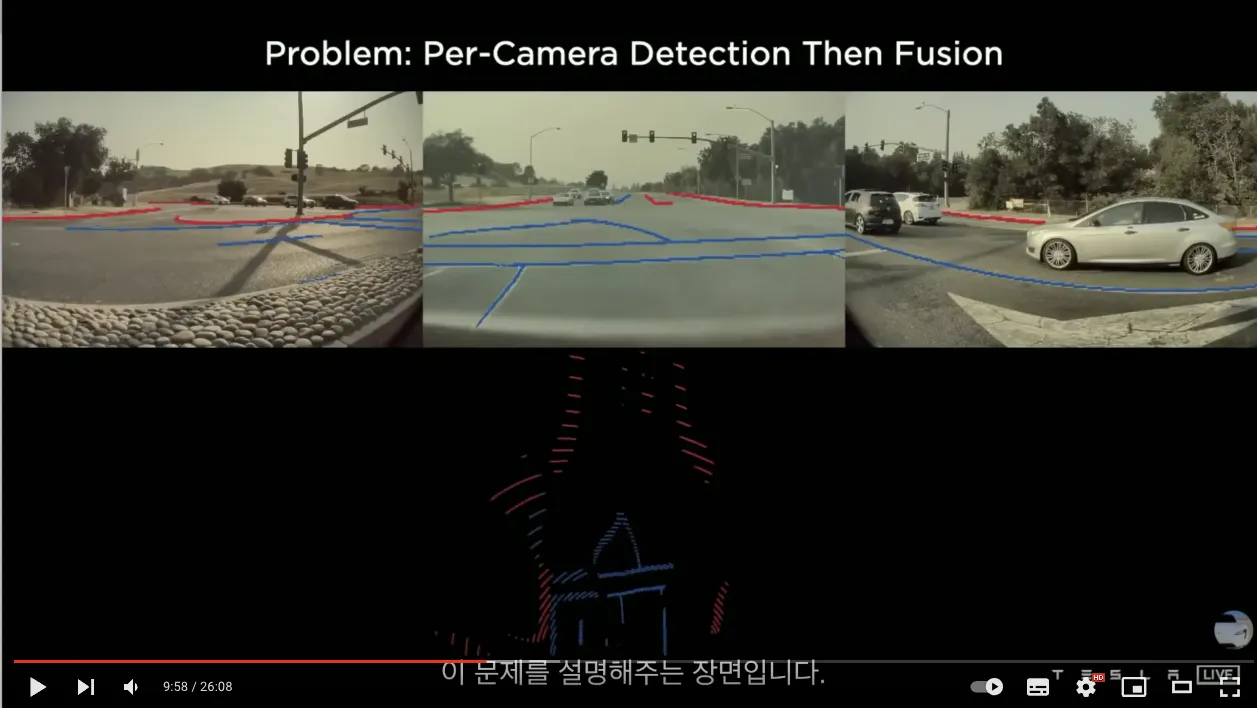
하지만 여기에서 안드레 카파시는 [2D(Cameras)→뉴럴넷→3D벡터공간→주행] 처럼 카메라에서 취득한 2D 이미지를 바로 3D 벡터공간으로 보내지 않고, [2D(Cameras)→뉴럴넷→2D(segmentation, detection output)→유사라이다 output과 결합→3D벡터공간→주행](ref5) 같이 한번 더 2D 상태로 매핑되는 것 자체가 문제(ref2) 라고 분석했다. 2D 정보로 구겨져 들어간 이 상태는 픽셀마다 부여된 거리의 노이즈를 매우 크게 증폭시키고, 추론을 오히려 더 어렵게 만든다는 점에서(ref3, ref4) 잘못된 선택(ref1, ref2) 이었다고 말한다.
그림(ref6)
뿐만 아니라 이것은 중간에 파라미터를 직접 튜닝해야 하는 컴포넌트(유사라이다 output과 결합하는 과정)가 포함되어 있어 end-to-end 학습을 방해하고, 학습 파이프라인을 더욱 복잡하게 만든다는 문제도 있다(ref1).
parse me : 언젠가 이 글에 쓰이면 좋을 것 같은 재료들.
1.
None
from : 과거의 어떤 원자적 생각이 이 생각을 만들었는지 연결하고 설명합니다.
1.
•
occupancy tracker은 2D segmentation 결과물에 유사라이다 기법을 통해 얻은 3D depth 를 조합한 결과물이다.
supplementary : 어떤 새로운 생각이 이 문서에 작성된 생각을 뒷받침하는지 연결합니다.
1.
None
opposite : 어떤 새로운 생각이 이 문서에 작성된 생각과 대조되는지 연결합니다.
1.
None
to : 이 문서에 작성된 생각이 어떤 생각으로 발전되고 이어지는가?
1.
ref : 생각에 참고한 자료입니다.